

Question: Need help on creating an algorithm that follows a path, such as picture down below. I'm not sure how I would find a starting point
Need help on creating an algorithm that follows a path, such as picture down below. I'm not sure how I would find a starting point or how to setup a path following program using C++. An example would be appreciated.
need an output to display
t0 | xt0, yt0 | xr0, yr0 | vlr0, vrr0 | e0 t1 | xt1, yt1 | xr1, yr1 | vlr1, vrr1 | e1 t2 | xt2, yt2 | xr2, yr2 | vlr2, vrr2 | e2
t is the running timext, yt is the target position estimated from the desired trajectoryxr, yr is the actual position of the robotvlr, vrr is the left and right instantaneous speeds of the robot wheelse is the current error in the robot position
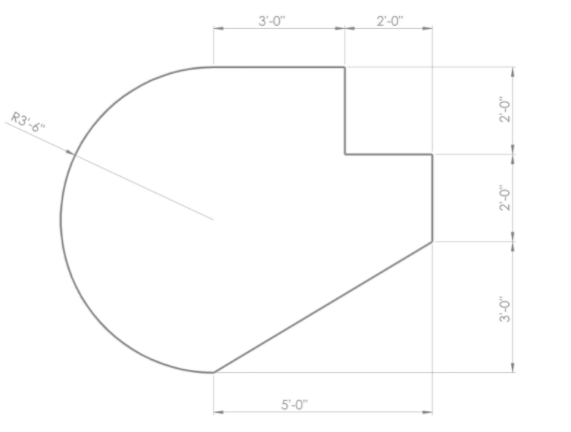
3-09 2-0" R3-6 2-0" 2-0" 3-0" 5'-0
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock