

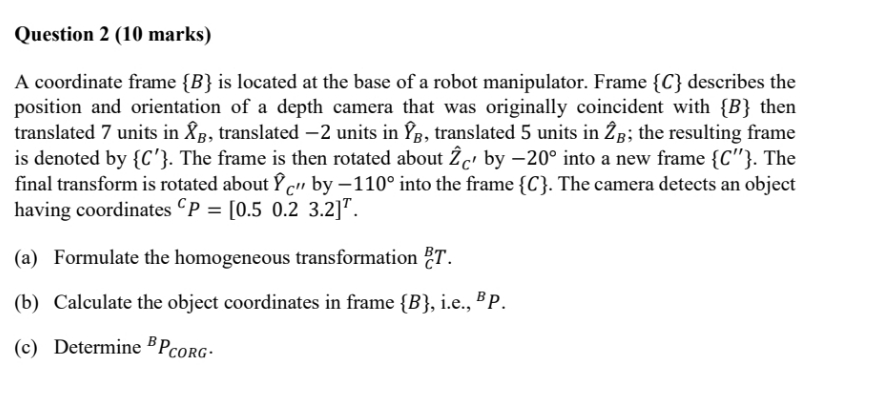
Question: Need help to solve this question 2 Question 2 (III marks) A coordinate frame {3} is located at the base of a robot manipulator. Frame
Need help to solve this question 2
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock