Question: Need help to solve this question. Study Notes for the Concept of Rotation Matrix (3) Using different notations for the three principal axes, the position
Need help to solve this question.
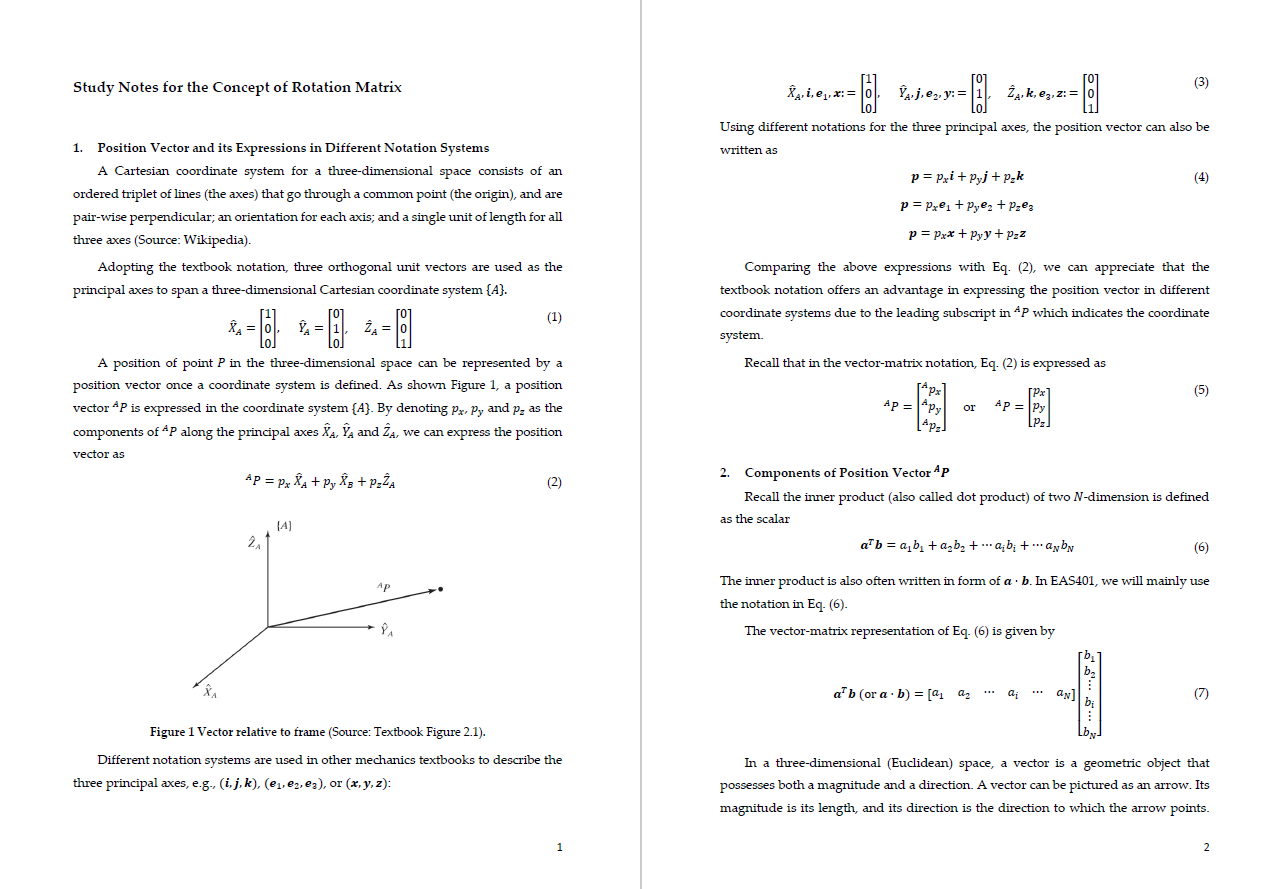
Study Notes for the Concept of Rotation Matrix (3) Using different notations for the three principal axes, the position vector can also be 1. Position Vector and its Expressions in Different Notation Systems written as A Cartesian coordinate system for a three-dimensional space consists of an p = Pxi + Pyj + Pzk (4) ordered triplet of lines (the axes) that go through a common point (the origin), and are P = Pxe1 + Pye2 + Prez pair-wise perpendicular; an orientation for each axis; and a single unit of length for all three axes (Source: Wikipedia). p = Pxx + Pyy + Pzz Adopting the textbook notation, three orthogonal unit vectors are used as the Comparing the above expressions with Eq. (2), we can appreciate that the principal axes to span a three-dimensional Cartesian coordinate system {A]. textbook notation offers an advantage in expressing the position vector in different (1) coordinate systems due to the leading subscript in *P which indicates the coordinate system. A position of point P in the three-dimensional space can be represented by a Recall that in the vector-matrix notation, Eq. (2) is expressed as position vector once a coordinate system is defined. As shown Figure 1, a position [APx [Px] (5) vector "P is expressed in the coordinate system (A). By denoting Px, Py and p, as the AP = py or Py components of #P along the principal axes XA, YA and ZA, we can express the position vector as AP = Px Xa + Py Xs + P=ZA (2) 2. Components of Position Vector Ap Recall the inner product (also called dot product) of two N-dimension is defined as the scalar (6) AP The inner product is also often written in form of a . b. In EAS401, we will mainly use the notation in Eq. (6). The vector-matrix representation of Eq. (6) is given by ab (or a . b) = [a] ag . a; . aN] (7 ) Figure 1 Vector relative to frame (Source: Textbook Figure 2.1). Different notation systems are used in other mechanics textbooks to describe the In a three-dimensional (Euclidean) space, a vector is a geometric object that three principal axes, e.g., (i, j. k), (e1. ez, ez), or (x, y, z): possesses both a magnitude and a direction. A vector can be pictured as an arrow. Its magnitude is its length, and its direction is the direction to which the arrow points. 1 2The magnitude of a vector a is denoted by llall. The dot product of two three- dimensional vectors a and b is given by a . b = ||all||b|| cos(@) (8) where o is the angle between the vectors a and b. In particular, if the vectors a and b are orthogonal, i.e., 0 = n/2, then allcos(e) a . b = 0 (9) Figure 2 Scalar projection of a vector a to vector b. At the other extreme, if they are codirectional, then the angle between them is zero with cos(0) = 1, then Dot product of a vector a and a unit vector b is the scalar projection of a to b a . b = [alll|b]| (10) a . b = llallllbl| cos(@) = llallcos(8) (16) This implies that the dot product of a vector a with itself is The dot product of two unit vectors a and b yields the cosine of angles between a . a = llall (11) them a . b = llalll|bl| cos(0) = cos(@) (17) which gives Hall = va . a (12) The components of AP along the principal axes XA, YA and ZA are denoted by px. Py and pr. They are the projection of the position vector to the three principal axes the formula for the Euclidean length of the vector. According to this definition, the obtaining by the dot product operation of the position vector 4P with the magnitude (modulus) of a N-dimensional vector can be calculated as corresponding unit vectors XA, YA and ZA (18) llall = Jai tai + ...+ ap (13) Px = AP . XA = [Px Py P=]|0 If the modulus of a vector a is a unit, i.e., ||all = 1, the vector is called a unit vector. Py = AP . YA = [Px Py P=] 1 The vectors used to span the three-dimensional coordinate system are unit vectors, ie., LOL 1|XAll = 1, 1/YAll = 1, 1/2All = 1 (14) Pz = 4P . ZA = [Px Py P=] |0 The scalar projection (or scalar component) of a vector a in the direction of a Consider a two-dimensional case shown in Figure 3, the projection of the position vector b is given by vector 4P yields the following components: ab = llallcos(e) (15) Px = 4p . KA = 1|4Pl| cos(8) (19) Py = 4p . YA = [|4Pll sin(@) where o is the angle between a and b. Note that ap is a scalar (magnitude of the projection). P= = AP . ZA = 0 Based on the definitions in Eq. (6) and (8), we can verify that the principal axes XA. YA and ZA hold the following property:KA . XA = 1, YA . VA = 1, ZA ZA = 1 (20) Since the dot product of two unit vectors yields the cosine of angles between them, RA . PA = 0, YA . ZA = 0, ZA . XA = 0 the components in the rotation matrix are often referred to as direction cosines. in which the first three results respond to Eq. (14). The unit vectors Xs, Y's and 25 are AXs, AY's and 475 are the unit vectors Xs, Y's and Zy expressed in the coordinate called orthonormal in Linear Algebra. system {A), therefore the columns in the rotation matrix #R are orthonormal as showed in Eq. (20). YA Proof of Eq. (2.5) and Eq. (2.7) Note that XA, BY, and ZA are the unit vectors XA, YA and ZA in coordinate system {A] expressed in coordinate system {B) respectively. By using the dot product P operation, the projection XA, YA and ZA in {A] can be expressed as Py = 114Pll sin(0) AP [XA . X=] [YA . X= ] [ZA . X=] (24) B XA = XA . VB. BYA = YA . YS. BZA = ZA . Y'S XA [YA . Z=] Px = 1|APll cos(0) ZA . ZE] Inspections of Eq. (22) and Eq. (24) shows that the rows of the rotation matrix ;R are the unit vectors of {A) expressed in {B). Figure 3 Components of AP in a two-dimensional space. KB . XA VS . XA ZB . XA] (25) AR = [4X5 4Y's Zy] = XB . YA VS . YA ZB . VA = BYT [XS . ZA VB . ZA ZB . ZA] [=27] 3. Proof of Eq. (2.3) where the commutativety properties (a . b = b . a) is used. The rotation matrix #R is stacked by three unit vectors together as the columns of Therefore, a rotation matrix can be interpreted as a set of three column vectors, or a 3 x 3 matrix, in the order of AXs, AV's and #28- a set of three row vectors. (21) With aid of Eq. (24), the rotation matrix AR maps frame {A) to frame (B) can be where * X5, Ya and 47: are the unit vectors Xs, Y's and Zy of the coordinate system obtained as [B) expressed in the coordinate system {A] respectively. By using the dot product [XA . KE YA. NE ZA. XS (26) operation, the projection Xs, Y's and Z, of in {A] can be expressed as AR = [XA BYA BZA] = XA . VS VA .Y'S ZA . VB XB . XA ] [Y's . XA ] ZB . XA KA . ZB YA . ZB ZA . Z=] (22) AXE = XB . YA. Y's . YA ZB . YA Comparing Eq. (23) with Eq. (26), we can conclude that XB . ZA] LV's . ZA LZB . ZA] AR = ART or AR = ART (27) Therefore, the components of rotation matrix can be written as the dot product of a pair of unit vectors: where the subscript T in AR" denotes the transpose of the matrix. Hence we obtain textbook equation (2.5) (23) AR = [AXE AYE AZ=] = XB . YA VB . VA ZB . YA We next consider the following calculation using the property that XA, BY, and KB . ZA VB . ZA ZA are the unit vectors in {B) 5(28) In order to calculate ^P, we note that the components of any vector are simply the ARART = BYT [5XA BYA BZA] = 13 projections of that vector onto the unit directions of its frame. The projection is calculated as the vector dot product. Therefore, the components of AP can be where Ia is the 3 x 3 identity matrix. calculated as 13 = 0 1 (29) APx = BXA . BP (35) We can also prove that the following relation by using the property that X5, 4Y, and Apy = BYA . BP *Z: are the unit vectors in {A} AP= = BZA . BP (30) ART AR = AVT [AX, AV, 425] = 13 where [BPx] (36) According to the definition of matrix inverse, we have BP = Py RAR = 12 or AR-1AR = 13 (31) Consequently, where # R- is the inverse of # R, and PR- is the inverse of AR. [Apx] (37) Using the above results, we obtain * Py = BYT BP AR = AR-1 = ART (32) Using the rotation matrix in Eq. (34), Eq. (37) can be written as and AP = BRAP (38) AR = AR-1 = ART (33) Therefore, we obtain the textbook equation (2.13). Therefore, the textbook equation (2.7) is proved. Eq. (38) implements a mapping by changing the description of a vector from BP, Indeed, from Linear Algebra, we know that the inverse of a matrix orthonormal which describes a point in space relative to {B), into *P, which is a description of the columns is equal to its transpose. same point, but expressed relative to {A]. . Proof of Eq. (2.13) Za ZA Recall that a rotation matrix can be interpreted as a set of three column vectors, or a set of three row vectors, as follows: XA (34) As shown in Figure 4, if the position vector with respective to {B) is known (i.e., BP), we want to know the definition of the position vector in {A] (i.e., AP). Figure 4 Rotating the description of a vector (Source: Textbook Figure 2.5). 8Question 1 (15 marks) Figure Q1 shows a coordinate ame {A}. Here if; is pointing out of page according to the right- hand rule. The ame {A} is rotated by H = '20\" about i: into a new coordinate 'ame {B}. {A} i A 2.4 Figure Q1: Illustration of frame {A}. a Plot a E to schematicall illustrate the coordinate 'ame 3 based on the illustration gure Y given in Figure Q1. (b) List formula to calculate the rotation matrix ll and present number result. (c) Demonstrate that the t? is orthonormal by calculation. (d) A position vector is expressed in {A} as AP = [1 2F. Calculate its position in {B}, i.e., a P. [e] A position vector is expressed in {B} as 1if} = [1 I] 2F. Calculate its position in {A}, i.e., A P. (t) Calculate determinant of ll, i.e., IRI