

Question: NEED MATLAB Code Write a computer program to compute the inverse kinematic equations for the elbow manipulator using Equations (3.64)-(3.69). Include procedures for identifying singular
NEED MATLAB Code
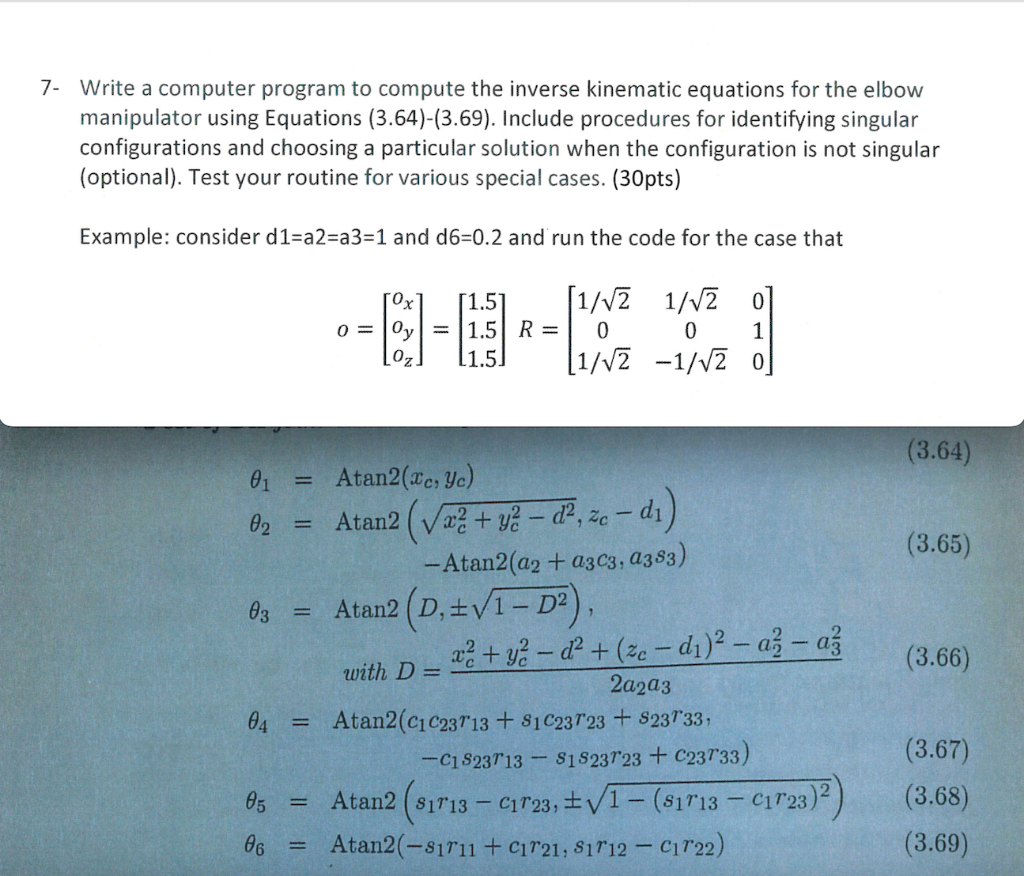
Write a computer program to compute the inverse kinematic equations for the elbow manipulator using Equations (3.64)-(3.69). Include procedures for identifying singular configurations and choosing a particular solution when the configuration is not singular (optional). Test your routine for various special cases. (30pts) Example: consider d1=a2=a3=1 and d6=0.2 and run the code for the case that o=oxoyoz=1.51.51.5R=1/201/21/201/20101=Atan2(xc,yc)2=Atan2(xc2+yc2d2,zcd1)Atan2(a2+a3c3,a3s3)3=Atan2(D,1D2)withD=2a2a3xc2+yc2d2+(zcd1)2a22a324=Atan2(c1c23r13+s1c23r23+s23r33c1s23r13s1s23r23+c23r33)5=Atan2(s1r13c1r23,1(s1r13c1r23)2)6=Atan2(s1r11+c1r21,s1r12c1r22) Write a computer program to compute the inverse kinematic equations for the elbow manipulator using Equations (3.64)-(3.69). Include procedures for identifying singular configurations and choosing a particular solution when the configuration is not singular (optional). Test your routine for various special cases. (30pts) Example: consider d1=a2=a3=1 and d6=0.2 and run the code for the case that o=oxoyoz=1.51.51.5R=1/201/21/201/20101=Atan2(xc,yc)2=Atan2(xc2+yc2d2,zcd1)Atan2(a2+a3c3,a3s3)3=Atan2(D,1D2)withD=2a2a3xc2+yc2d2+(zcd1)2a22a324=Atan2(c1c23r13+s1c23r23+s23r33c1s23r13s1s23r23+c23r33)5=Atan2(s1r13c1r23,1(s1r13c1r23)2)6=Atan2(s1r11+c1r21,s1r12c1r22)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts