

Question: Need some help with TODO part matlab code. Can't fix the error. The below figure shows the configuration, at t=0, of a robot arm whose
Need some help with TODO part matlab code. Can't fix the error.
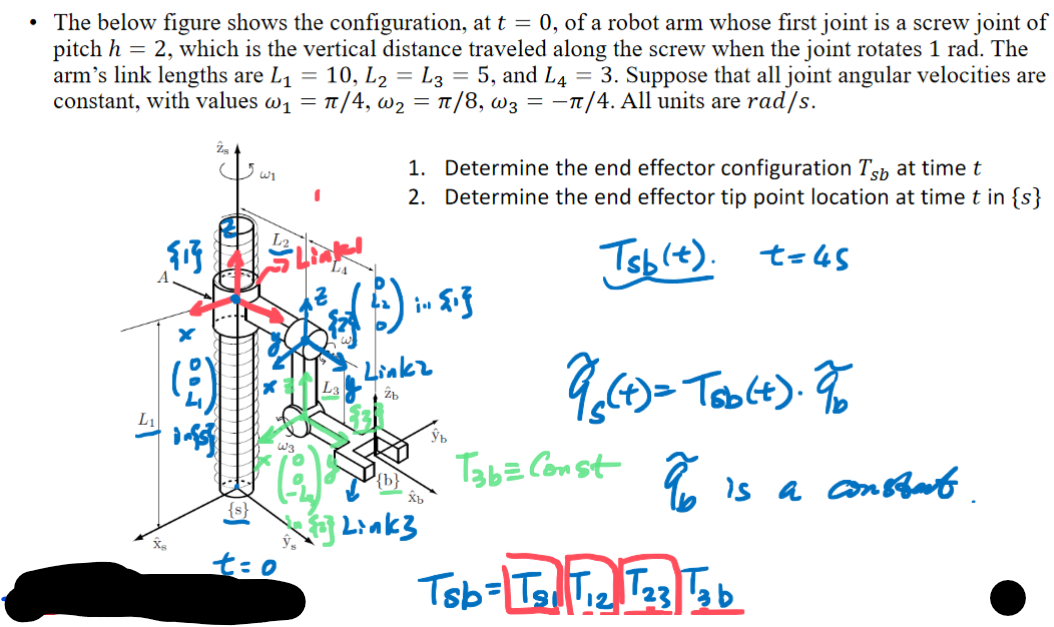
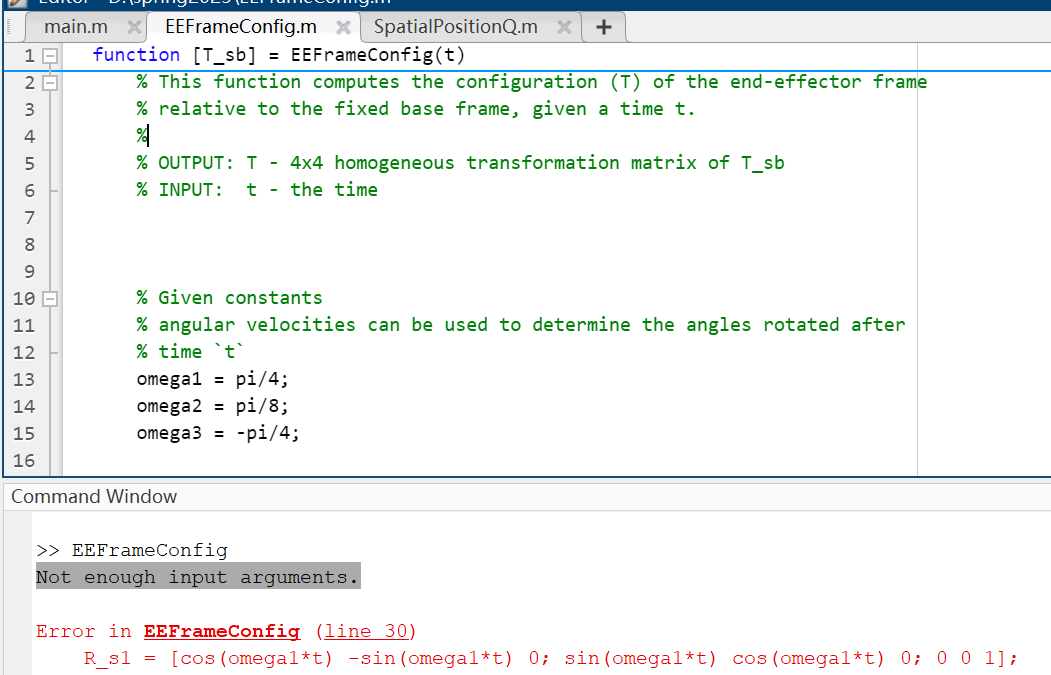
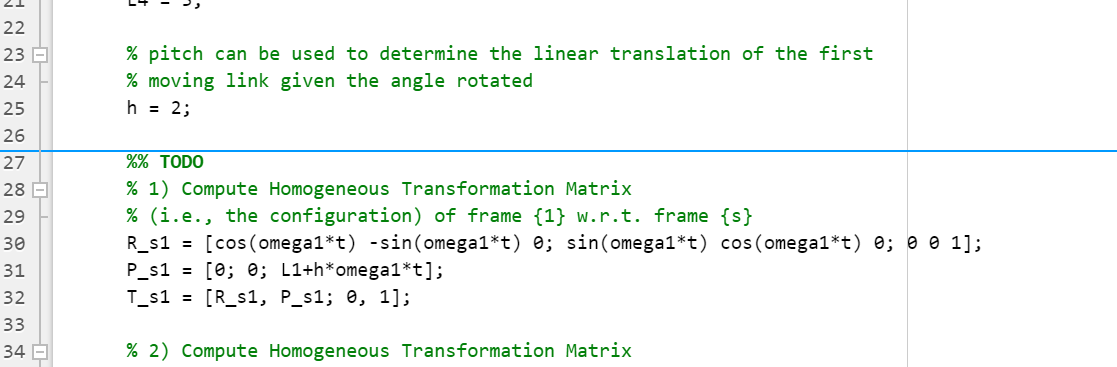
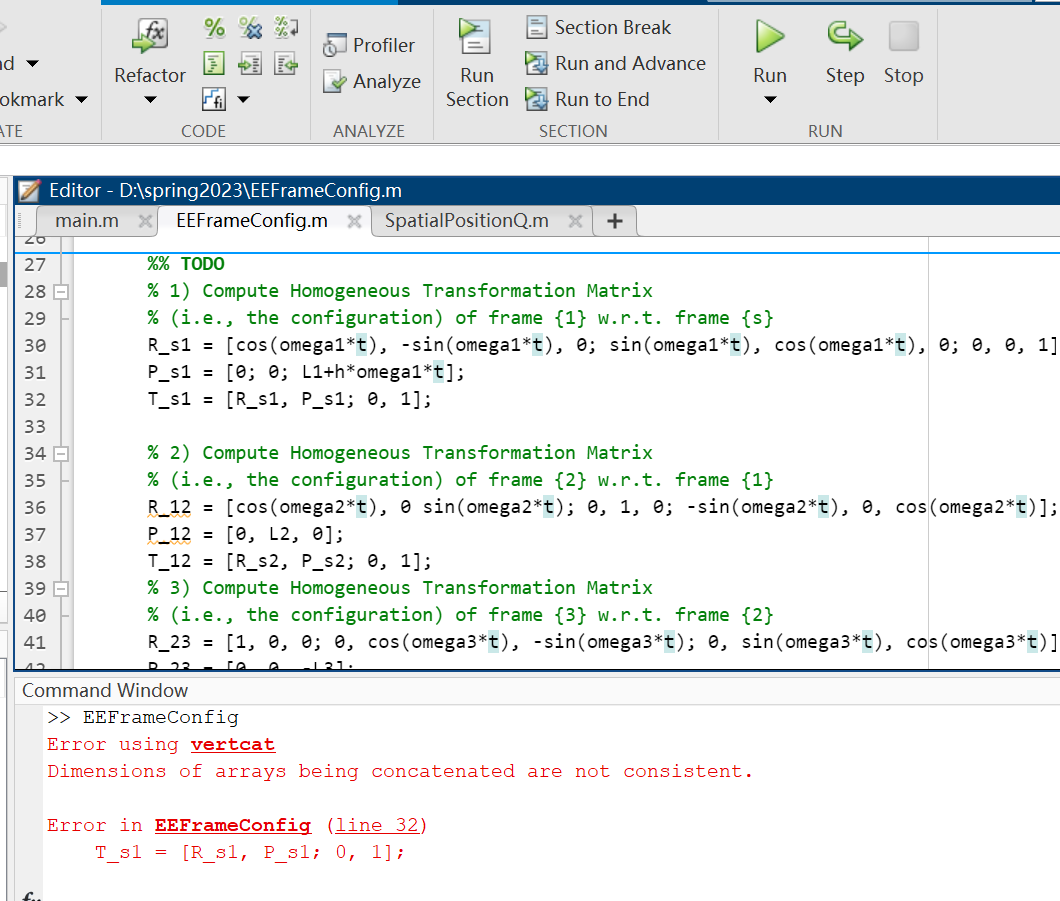
The below figure shows the configuration, at t=0, of a robot arm whose first joint is a screw joint of pitch h=2, which is the vertical distance traveled along the screw when the joint rotates 1 rad. The arm's link lengths are L1=10,L2=L3=5, and L4=3. Suppose that all joint angular velocities are constant, with values 1=/4,2=/8,3=/4. All units are rad/s. ?rmine the end effector configuration Tsb at time t ?rmine the end effector tip point location at time t in {s} Tsp (t).t=45 qs(t)=Tsb(t)q~b main.m EEFrameConfig.m SpatialPositionQ.m function [T_sb] = EEFrameConfig(t) \% This function computes the configuration ( T ) of the end-effector frame \% relative to the fixed base frame, given a time t. % \% OUTPUT: T - 4x4 homogeneous transformation matrix of T_sb \% INPUT: t - the time \% Given constants \% angular velocities can be used to determine the angles rotated after % time 't' omega1 =pi/4; omega2 =pi/8; omega3 =pi/4; >> EEFrameConfig Not enough input arguments. Error in EEFrameConfig (line 30) \% pitch can be used to determine the linear translation of the first \% moving link given the angle rotated h=2; \%\% TODO \% 1) Compute Homogeneous Transformation Matrix \% (i.e., the configuration) of frame {1} w.r.t. frame {s} \( R_{\text {R_s }}=[\cos ( \) omega1*t) sin( omega1*t) ;sin( omega1*t) cos( omega1*t) 0;1]; Ps1=[;;L1+h omega1*t ]; \( T_{\text {_s1 }}=\left[R_{\text {_s1 }}, P_{\text {_s1 }} 1 ; 0,1 ight] \); \% 2) Compute Homogeneous Transformation Matrix \%\% TODO \% 1) Compute Homogeneous Transformation Matrix \% (i.e., the configuration) of frame {1} w.r.t. frame {s} R_s1 =[cos( omega1*t), sin( omega1*t), 0;sin( omega 1t),cos( omega1*t), 0;,0,1 Ps1=[;;L1+h omega1*t ]; Ts1=[Rs1,Ps1;0,1]; \% 2) Compute Homogeneous Transformation Matrix \% (i.e., the configuration) of frame {2} w.r.t. frame {1} \( R_{\text {R_12 }}=[\cos ( \) omega2 t),sin( omega2*t); 0,1,;sin( omega2*t), ,cos( omega2*t)] P12=[,L2,]; T_12 = [R_s2, P_s2; ,1]; \% 3) Compute Homogeneous Transformation Matrix \% (i.e., the configuration) of frame {3} w.r.t. frame {2} \( R_{\text {R_23 }}=\left[1,0, \theta ; \theta, \cos ( ight. \) omega 3t),sin( omega 3t);,sin( omega3*t ),cos( omega3*t) D 22 ia a 127. Command Window > EEFrameConfig Error using vertcat Dimensions of arrays being concatenated are not consistent. Error in EEFrameConfig (line 32) Tsl=[Rss1,Psl;0,1]; or - D:\spring2023EEFrameConfig.m
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts