

Question: Noted: everything related to coding and simulating must be work on Matlab Given a 2-DOF RP (Revolute-prismatic) robot with the link frames as in the
Noted: everything related to coding and simulating must be work on Matlab
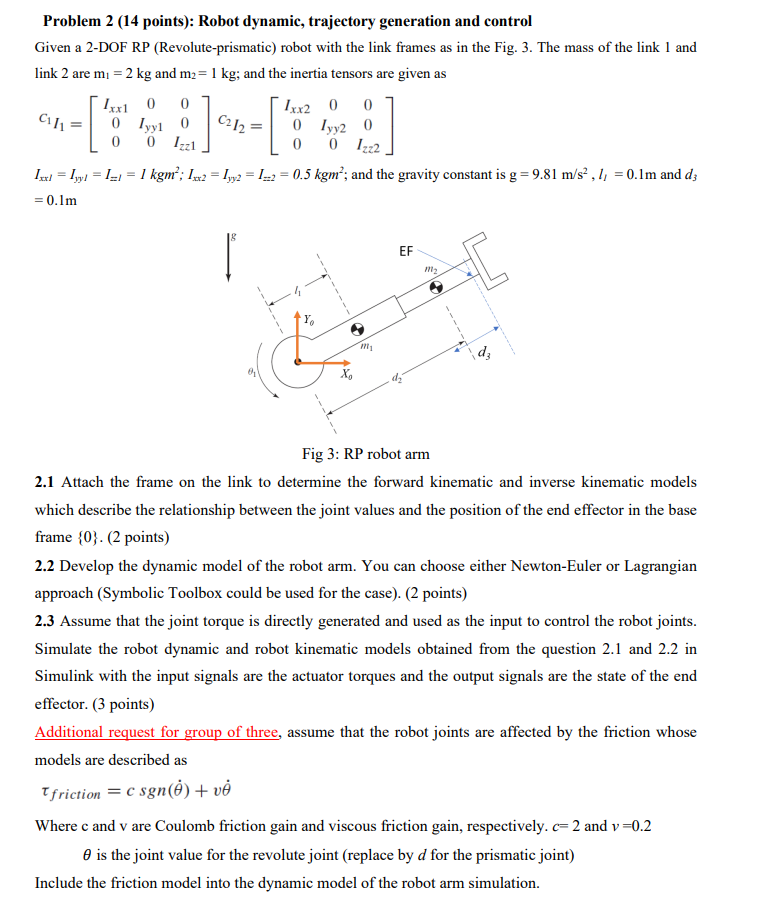
Given a 2-DOF RP (Revolute-prismatic) robot with the link frames as in the Fig. 3. The mass of the link 1 and link 2 are m1=2kg and m2=1kg; and the inertia tensors are given as CI1=Ixx1000Iyy1000Izz1C2I2=Ixx2000Iyy2000Izz2 Ixxl=Iyyl=IzzI=1kgm2;Ixx2=Iyy2=Izz2=0.5kgm2; and the gravity constant is g=9.81m/s2,ll=0.1m and d3 =0.1m Fig 3: RP robot arm 2.1 Attach the frame on the link to determine the forward kinematic and inverse kinematic models which describe the relationship between the joint values and the position of the end effector in the base frame {0}. ( 2 points) 2.2 Develop the dynamic model of the robot arm. You can choose either Newton-Euler or Lagrangian approach (Symbolic Toolbox could be used for the case). ( 2 points) 2.3 Assume that the joint torque is directly generated and used as the input to control the robot joints. Simulate the robot dynamic and robot kinematic models obtained from the question 2.1 and 2.2 in Simulink with the input signals are the actuator torques and the output signals are the state of the end effector. ( 3 points) Additional request for group of three, assume that the robot joints are affected by the friction whose models are described as friction=csgn()+v Where c and v are Coulomb friction gain and viscous friction gain, respectively. c=2 and v=0.2 is the joint value for the revolute joint (replace by d for the prismatic joint) Include the friction model into the dynamic model of the robot arm simulation
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts