

Question: Optimization of Dynamic Systems Consider a mass - spring - damper system described by the state - space x 1 ( t ) = x
Optimization of Dynamic Systems
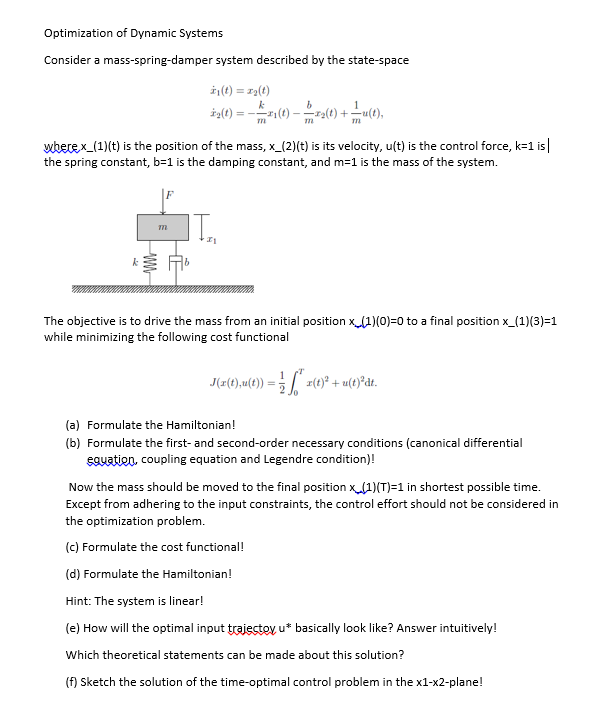
Consider a massspringdamper system described by the statespace
where, is the position of the mass, is its velocity, is the control force, is
the spring constant, is the damping constant, and is the mass of the system.
The objective is to drive the mass from an initial position to a final position
while minimizing the following cost functional
a Formulate the Hamiltonian!
b Formulate the first and secondorder necessary conditions canonical differential
equation, coupling equation and Legendre condition
Now the mass should be moved to the final position in shortest possible time.
Except from adhering to the input constraints, the control effort should not be considered in
the optimization problem.
c Formulate the cost functional!
d Formulate the Hamiltonian!
Hint: The system is linear!
e How will the optimal input trajectoy u basically look like? Answer intuitively!
Which theoretical statements can be made about this solution?
f Sketch the solution of the timeoptimal control problem in the xxplane!
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock