

Question: P control. You can work out this problem without using Matlab at all. But if you want, you can play with the provided Matlab program.
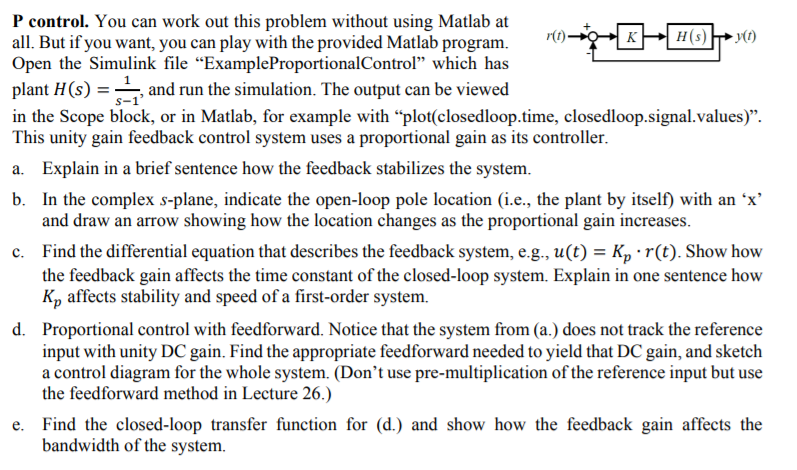
P control. You can work out this problem without using Matlab at all. But if you want, you can play with the provided Matlab program. r(1) K H(S) yt) Open the Simulink file ExampleProportionalControl which has plant H(s) = =, and run the simulation. The output can be viewed in the Scope block, or in Matlab, for example with plot(closedloop.time, closedloop.signal.values). This unity gain feedback control system uses a proportional gain as its controller. a. Explain in a brief sentence how the feedback stabilizes the system. b. In the complex s-plane, indicate the open-loop pole location (i.e., the plant by itself) with an x? and draw an arrow showing how the location changes as the proportional gain increases. c. Find the differential equation that describes the feedback system, e.g., u(t) = Kp r(t). Show how the feedback gain affects the time constant of the closed-loop system. Explain in one sentence how Ky affects stability and speed of a first-order system. d. Proportional control with feedforward. Notice that the system from (a.) does not track the reference input with unity DC gain. Find the appropriate feedforward needed to yield that DC gain, and sketch a control diagram for the whole system. (Don't use pre-multiplication of the reference input but use the feedforward method in Lecture 26.) e. Find the closed-loop transfer function for (d.) and show how the feedback gain affects the bandwidth of the system. P control. You can work out this problem without using Matlab at all. But if you want, you can play with the provided Matlab program. r(1) K H(S) yt) Open the Simulink file ExampleProportionalControl which has plant H(s) = =, and run the simulation. The output can be viewed in the Scope block, or in Matlab, for example with plot(closedloop.time, closedloop.signal.values). This unity gain feedback control system uses a proportional gain as its controller. a. Explain in a brief sentence how the feedback stabilizes the system. b. In the complex s-plane, indicate the open-loop pole location (i.e., the plant by itself) with an x? and draw an arrow showing how the location changes as the proportional gain increases. c. Find the differential equation that describes the feedback system, e.g., u(t) = Kp r(t). Show how the feedback gain affects the time constant of the closed-loop system. Explain in one sentence how Ky affects stability and speed of a first-order system. d. Proportional control with feedforward. Notice that the system from (a.) does not track the reference input with unity DC gain. Find the appropriate feedforward needed to yield that DC gain, and sketch a control diagram for the whole system. (Don't use pre-multiplication of the reference input but use the feedforward method in Lecture 26.) e. Find the closed-loop transfer function for (d.) and show how the feedback gain affects the bandwidth of the system
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts