

Question: Paper - based tasks Q 1 : Briefly discuss various types of locomotion for the autonomous ground vehicles. Q 2 : Define degree of mobility
Paperbased tasks
Q : Briefly discuss various types of locomotion for the autonomous ground vehicles.
Q : Define degree of mobility and degree of steerability.
Q : Derive kinematic model of differential drive robot. Clearly draw the figure of the robot and
mention all the necessary parameters on the figure.
Computerbased tasks
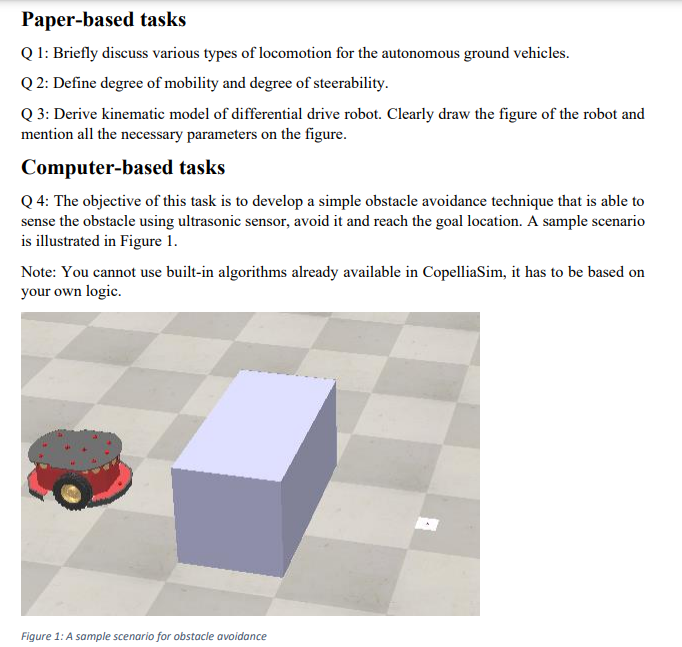
Q : The objective of this task is to develop a simple obstacle avoidance technique that is able to
sense the obstacle using ultrasonic sensor avoid it and reach the goal location. A sample scenario
is illustrated in Figure
Note: You cannot use builtin algorithms already available in CopelliaSim, it has to be based on
your own logic. Could you please solve the questions for me one by one, clearly and accurately?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock