

Question: PART V.MAPPING Consider the following case. A robot is trying to localize in an area it has mapped, containing only two possible locations, a room
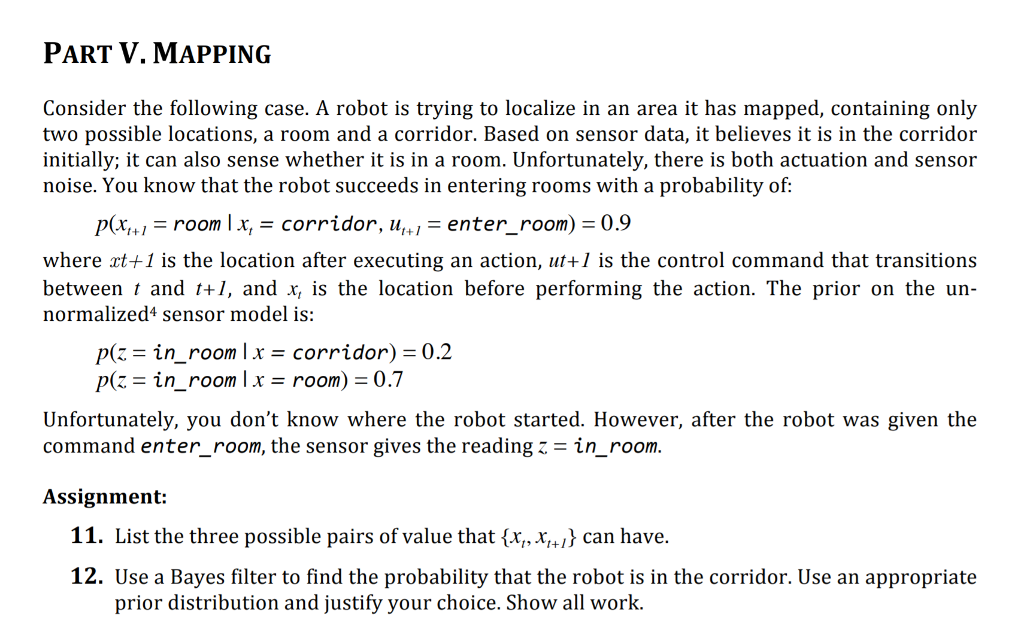
PART V.MAPPING Consider the following case. A robot is trying to localize in an area it has mapped, containing only two possible locations, a room and a corridor. Based on sensor data, it believes it is in the corridor initially; it can also sense whether it is in a room. Unfortunately, there is both actuation and sensor noise. You know that the robot succeeds in entering rooms with a probability of: p(x,+,-roon l x, = corridor, l,+,-enter-room) : 0.9 where rt+1 is the location after executing an action, ut+1 is the control command that transitions between and 1+1, and x, is the location before performing the action. The prior on the un- normal lized* sensor model is: p(z-in_room lx corridor) 0.2 plain_room lxroom)0.7 Unfortunately, you don't know where the robot started. However, after the robot was given the command enter-room, the sensor gives the reading in-room. Assignment: 11. List the three possible pairs of value that {X,,X,. can have. 12. Use a Bayes filter to find the probability that the robot is in the corridor. Use an appropriate prior distribution and justify your choice. Show all work. PART V.MAPPING Consider the following case. A robot is trying to localize in an area it has mapped, containing only two possible locations, a room and a corridor. Based on sensor data, it believes it is in the corridor initially; it can also sense whether it is in a room. Unfortunately, there is both actuation and sensor noise. You know that the robot succeeds in entering rooms with a probability of: p(x,+,-roon l x, = corridor, l,+,-enter-room) : 0.9 where rt+1 is the location after executing an action, ut+1 is the control command that transitions between and 1+1, and x, is the location before performing the action. The prior on the un- normal lized* sensor model is: p(z-in_room lx corridor) 0.2 plain_room lxroom)0.7 Unfortunately, you don't know where the robot started. However, after the robot was given the command enter-room, the sensor gives the reading in-room. Assignment: 11. List the three possible pairs of value that {X,,X,. can have. 12. Use a Bayes filter to find the probability that the robot is in the corridor. Use an appropriate prior distribution and justify your choice. Show all work
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts