

Question: Pipe Maintenance Robot Inputs Pipe Maintenance Roboto Outputs The pipe maintenance robot has: An On / Oel buttort jot On A compana for oneriting
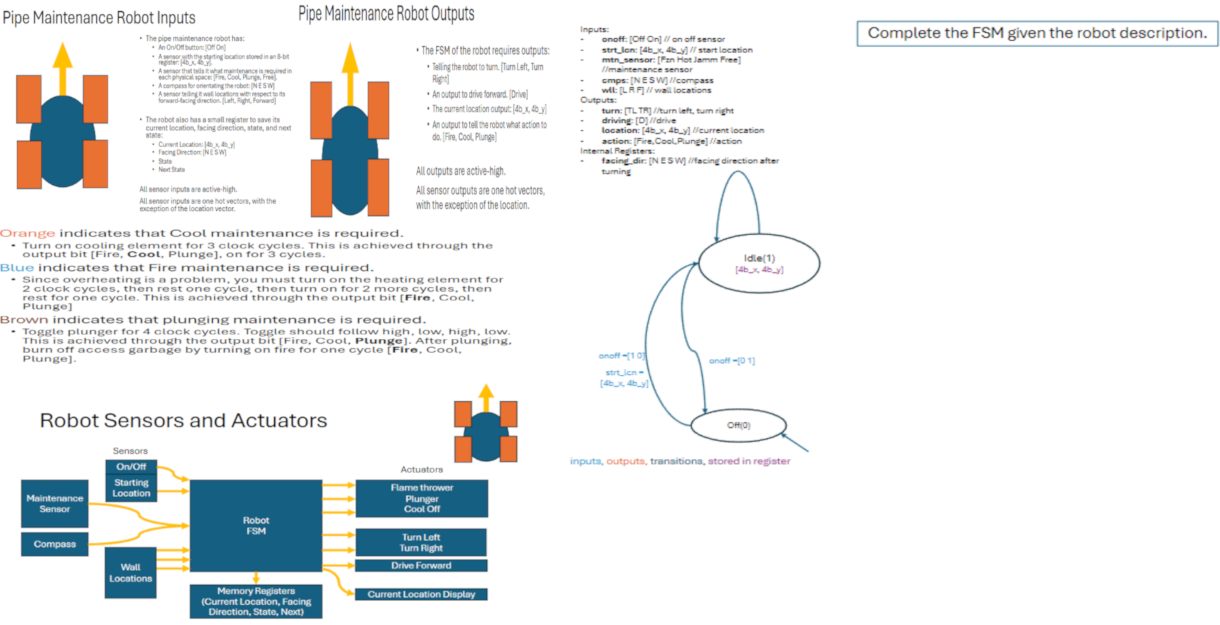
Pipe Maintenance Robot Inputs
Pipe Maintenance Roboto Outputs
The pipe maintenance robot has:
An OnOel buttort jot On
A compana for oneriting the robet: NE SW
The robet also has a small regiver to sune its
current location, tacing direction, state, and neet
sibie:
: Sate
Nentsab
All sensor inpuls are setivehigh.
All sensor inpuls ars one hot vectors, with the
Inputs:
onoff: Off On on off sensor
The FSM of the robot requires outputs:
Talling the robot to turn. Tum Left, Tum
Fist'
An output to drin tonard. Drive
The current location output
An output to tall Be robot watal action
daFire Cood, Pungsi
All outputs are activehigh.
All sensor outputs are one hot vectors,
with the exception of the location.
Orange indicates that Cool maintenance is required.
Turn on cooling element for clock cycles. This is achieved through the
Turn on cooling element for clock cycles. This
Blue indicates that Fire maintenance is required.
Since overheating is a problem, you must turn on the heating element for
clock cycles, then rest one cycle, then turn on for morecycles, then
rest for one cycle. This is achieved through the output bit Fire Cool,
Plunge
Brown indicates that plunging maintenance is required.
Toggle plunger for clock cycles. Toggle should follow high, low, high, low.
This is achieved through the output bit Fire Cool, Plunge After plunging.
burn off access garbage by turning on fire for one cycle Fire Cool,
Plunge Complete the FSM
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock