

Question: PLEASE ANSWER ASAP WITH CLEAR EXPLAINATION!! 4. 20pts. Let us consider the onboard software of a small, unmanned helicopter. The onboard software performs tasks from
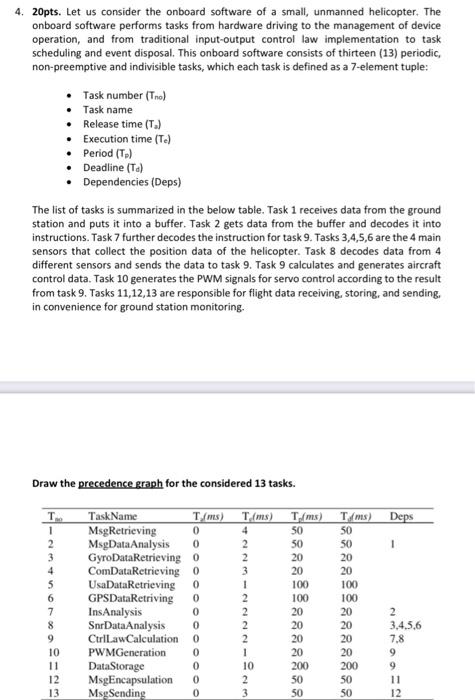
4. 20pts. Let us consider the onboard software of a small, unmanned helicopter. The onboard software performs tasks from hardware driving to the management of device operation, and from traditional input-output control law implementation to task scheduling and event disposal. This onboard software consists of thirteen (13) periodic, non-preemptive and indivisible tasks, which each task is defined as a 7-element tuple: Task number (The) Task name Release time (T.) Execution time (Te) Period (T.) Deadline (T) Dependencies (Deps) The list of tasks is summarized in the below table. Task 1 receives data from the ground station and puts it into a buffer. Task 2 gets data from the buffer and decodes it into instructions. Task 7 further decodes the instruction for task 9. Tasks 3,4,5,6 are the 4 main sensors that collect the position data of the helicopter. Task 8 decodes data from 4 different sensors and sends the data to task 9. Task 9 calculates and generates aircraft control data. Task 10 generates the PWM signals for servo control according to the result from task 9. Tasks 11,12,13 are responsible for flight data receiving, storing, and sending, in convenience for ground station monitoring Draw the precedence graph for the considered 13 tasks. T 1 2 3 4 5 6 7 8 9 10 11 12 13 TaskName T.(ms) Msg Retrieving 0 Msg Data Analysis 0 GyroDataRetrieving 0 ComDataRetrieving UsaDataRetrieving 0 GPSDataRetriving 0 InsAnalysis 0 Snr Data Analysis 0 CtrlLaw Calculation 0 PWMGeneration DataStorage MsgEncapsulation 0 MsgSending 0 T(m) T(ms) T(ms) Deps 4 50 50 2 50 50 1 2 20 20 3 20 20 1 100 100 2 100 100 2 20 20 2 2 20 20 3,4,5,6 2 20 20 7.8 1 20 20 9 10 200 200 9 2 50 50 11 50 50 12 0 0 4. 20pts. Let us consider the onboard software of a small, unmanned helicopter. The onboard software performs tasks from hardware driving to the management of device operation, and from traditional input-output control law implementation to task scheduling and event disposal. This onboard software consists of thirteen (13) periodic, non-preemptive and indivisible tasks, which each task is defined as a 7-element tuple: Task number (The) Task name Release time (T.) Execution time (Te) Period (T.) Deadline (T) Dependencies (Deps) The list of tasks is summarized in the below table. Task 1 receives data from the ground station and puts it into a buffer. Task 2 gets data from the buffer and decodes it into instructions. Task 7 further decodes the instruction for task 9. Tasks 3,4,5,6 are the 4 main sensors that collect the position data of the helicopter. Task 8 decodes data from 4 different sensors and sends the data to task 9. Task 9 calculates and generates aircraft control data. Task 10 generates the PWM signals for servo control according to the result from task 9. Tasks 11,12,13 are responsible for flight data receiving, storing, and sending, in convenience for ground station monitoring Draw the precedence graph for the considered 13 tasks. T 1 2 3 4 5 6 7 8 9 10 11 12 13 TaskName T.(ms) Msg Retrieving 0 Msg Data Analysis 0 GyroDataRetrieving 0 ComDataRetrieving UsaDataRetrieving 0 GPSDataRetriving 0 InsAnalysis 0 Snr Data Analysis 0 CtrlLaw Calculation 0 PWMGeneration DataStorage MsgEncapsulation 0 MsgSending 0 T(m) T(ms) T(ms) Deps 4 50 50 2 50 50 1 2 20 20 3 20 20 1 100 100 2 100 100 2 20 20 2 2 20 20 3,4,5,6 2 20 20 7.8 1 20 20 9 10 200 200 9 2 50 50 11 50 50 12 0 0
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts