

Question: ----PLEASE ANSWER WITHIN A COUPLE HOURS-------- Will give likes! Thank you A 2-link planar arm has a revolute joint at [0;0;0] in the fixed frame,
----PLEASE ANSWER WITHIN A COUPLE HOURS-------- Will give likes! Thank you
A 2-link planar arm has a revolute joint at [0;0;0] in the fixed frame, with a 12 cm link attached. At the end of that link is a second revolute joint with a 9 cm link attached. Assuming the end of the second link is the end effector position,
a.) write 2 homogeneous matrices that describe the transformation from the origin in the fixed frame to the endpoint, H.
b.)Write a SciLab or MATLAB program that models the forward kinematics of the 2-Link Planar Arm. Calculate the pose of H for two sets of joint Angles, a.) = [ 30; -90] and b.) = [-90; 90]
Example code is in the photo below
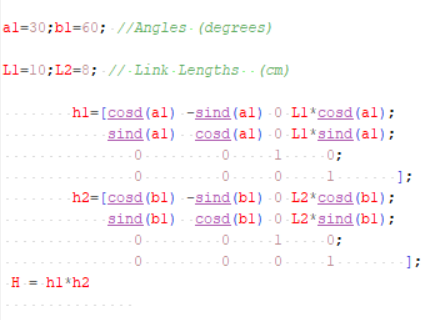
al=30;bl=60; //Angles. (degrees) Ll=10;L2=8; //-Link Lengths (cm) hl=[cosd (al) -sind (al) Ll*cosd (al); sind (al) cosd (al)-0 Ll*sind (al); -0... -0................0; 0 0 0 1 1 ; h2=[cosd (bl)-sind (bl)-0 L2*cosd (bl); sind (bl) cosd (bl)-0 L2*sind (bl); -0 -1....0; 0 0 0 1 ]; H = hl*h2 al=30;bl=60; //Angles. (degrees) Ll=10;L2=8; //-Link Lengths (cm) hl=[cosd (al) -sind (al) Ll*cosd (al); sind (al) cosd (al)-0 Ll*sind (al); -0... -0................0; 0 0 0 1 1 ; h2=[cosd (bl)-sind (bl)-0 L2*cosd (bl); sind (bl) cosd (bl)-0 L2*sind (bl); -0 -1....0; 0 0 0 1 ]; H = hl*h2
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts