

Question: Please derive equations of dynamics using Lagrange method for three link manipulator depicted in Figure 3. Link 1 is fixed. Please assume that both
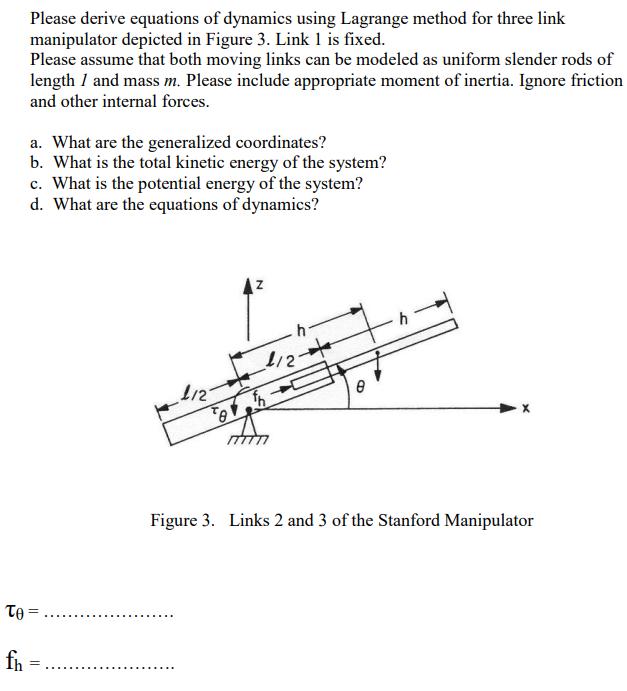
Please derive equations of dynamics using Lagrange method for three link manipulator depicted in Figure 3. Link 1 is fixed. Please assume that both moving links can be modeled as uniform slender rods of length I and mass m. Please include appropriate moment of inertia. Ignore friction and other internal forces. fh a. What are the generalized coordinates? b. What is the total kinetic energy of the system? c. What is the potential energy of the system? d. What are the equations of dynamics? To= = 112 TOV 1/2 + 9 h Figure 3. Links 2 and 3 of the Stanford Manipulator
Step by Step Solution
There are 3 Steps involved in it
Steps Step 1 of 2 Problem Please derive equations of dynamics using Lagrange method for three link manipulator depicted in Figure 3 Link 1 is fixed Pl... View full answer

Get step-by-step solutions from verified subject matter experts