

Question: * * please help me :( * * * i will fail if you dont We consider the robot show n in Figure 1 in
please help me :( i will fail if you dont
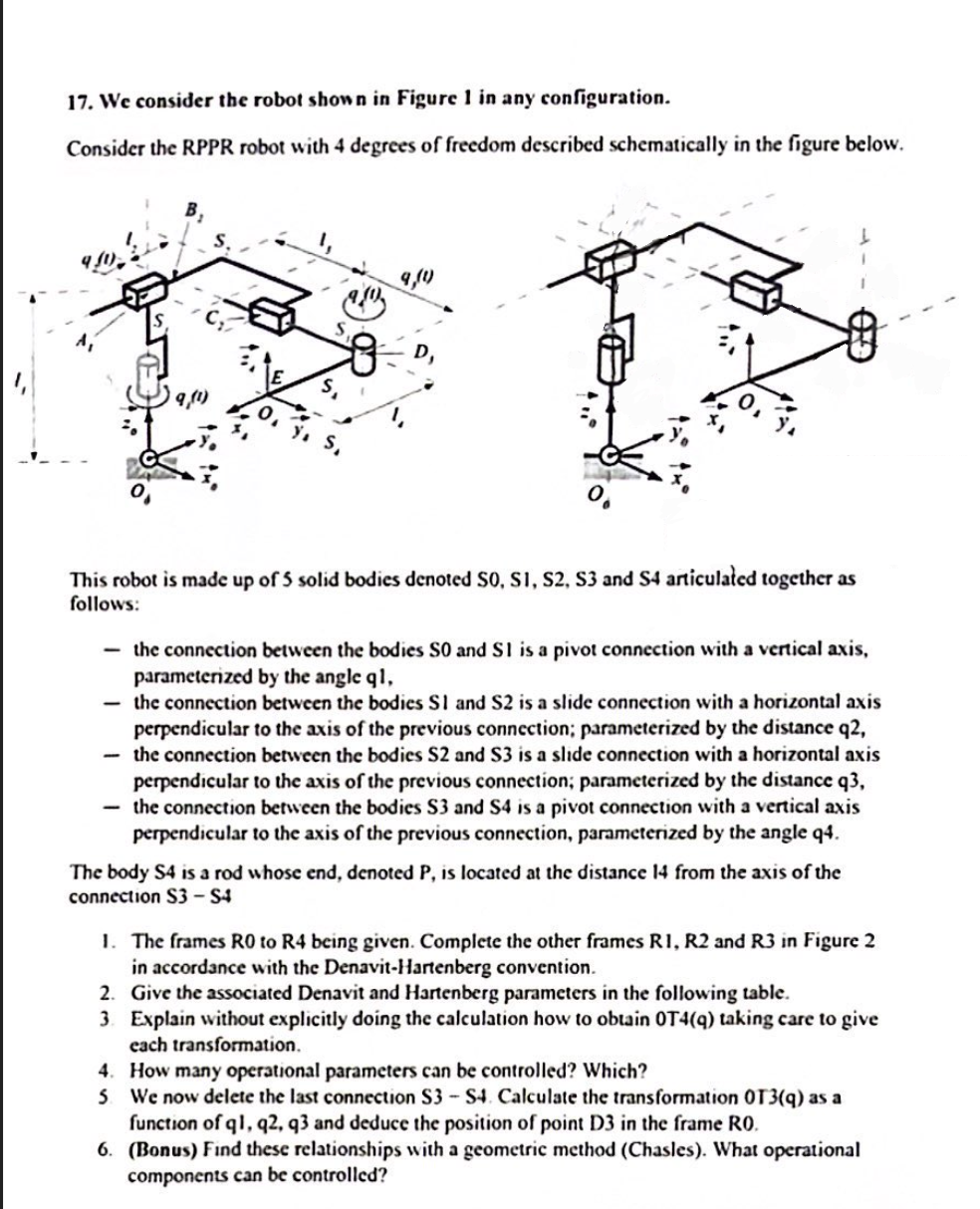
We consider the robot show in Figure in any configuration.
Consider the RPPR robot with degrees of freedom described schematically in the figure below.
This robot is made up of solid bodies denoted and articulated together as
follows:
the connection between the bodies and is a pivot connection with a vertical axis,
parameterized by the angle ql
the connection between the bodies and is a slide connection with a horizontal axis
perpendicular to the axis of the previous connection; parameterized by the distance
the connection between the bodies and is a slide connection with a horizontal axis
perpendicular to the axis of the previous connection; parameterized by the distance
the connection between the bodies and is a pivot connection with a vertical axis
perpendicular to the axis of the previous connection, parameterized by the angle
The body is a rod whose end, denoted is located at the distance from the axis of the
connection S S
The frames to being given. Complete the other frames and in Figure
in accordance with the DenavitHartenberg convention.
Give the associated Denavit and Hartenberg parameters in the following table.
Explain without explicitly doing the calculation how to obtain OTq taking care to give
each transformation.
How many operational parameters can be controlled? Which?
We now delete the last connection S Calculate the transformation as a
function of and deduce the position of point D in the frame R
Bonus Find these relationships with a geometric method Chasles What operational
components can be controlled?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock