

Question: please I need the mathmatical answer with numbers not just explain how to solve it,, Q1: A camera is attached to the end effector frame
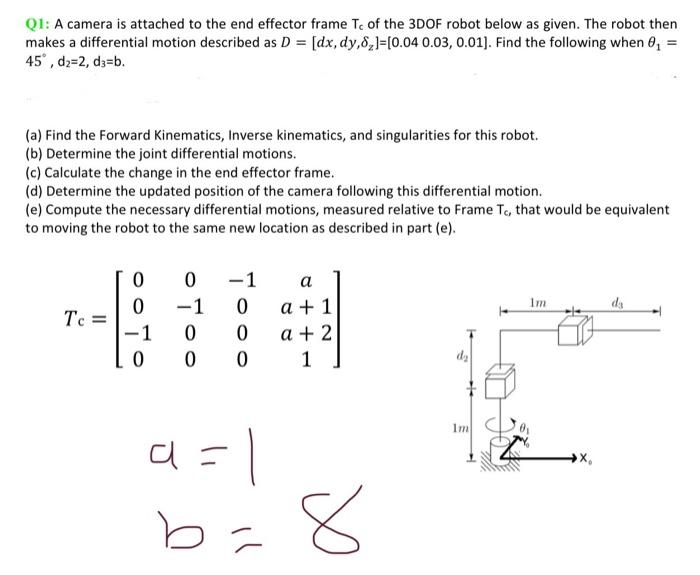
Q1: A camera is attached to the end effector frame Tc of the 3DOF robot below as given. The robot then makes a differential motion described as D=[dx,dy,z]=[0.040.03,0.01]. Find the following when 1= 45,d2=2,d3=b. (a) Find the Forward Kinematics, Inverse kinematics, and singularities for this robot. (b) Determine the joint differential motions. (c) Calculate the change in the end effector frame. (d) Determine the updated position of the camera following this differential motion. (e) Compute the necessary differential motions, measured relative to FrameTc, that would be equivalent to moving the robot to the same new location as described in part (e). Tc=001001001000aa+1a+21
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts