

Question: Please Include all steps and explaination 3 . 3 Inverted slider - crank: Multiple loops and auxiliary equations Consider the inverted slider - crank shown
Please Include all steps and explaination
Inverted slidercrank: Multiple loops and auxiliary equations
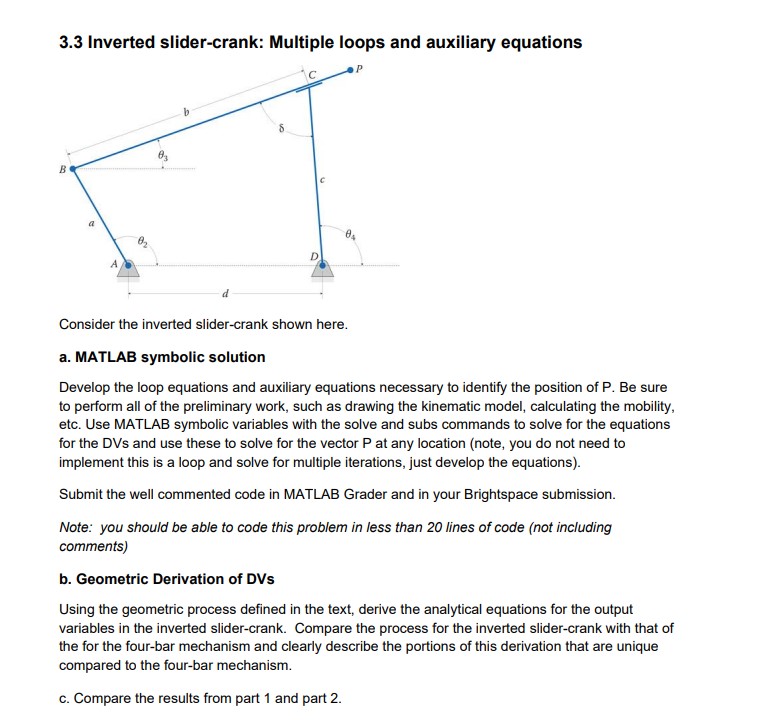
Consider the inverted slidercrank shown here.
a MATLAB symbolic solution
Develop the loop equations and auxiliary equations necessary to identify the position of P Be sure
to perform all of the preliminary work, such as drawing the kinematic model, calculating the mobility,
etc. Use MATLAB symbolic variables with the solve and subs commands to solve for the equations
for the DVs and use these to solve for the vector P at any location note you do not need to
implement this is a loop and solve for multiple iterations, just develop the equations
Submit the well commented code in MATLAB Grader and in your Brightspace submission.
Note: you should be able to code this problem in less than lines of code not including
comments
b Geometric Derivation of DVs
Using the geometric process defined in the text, derive the analytical equations for the output
variables in the inverted slidercrank. Compare the process for the inverted slidercrank with that of
the for the fourbar mechanism and clearly describe the portions of this derivation that are unique
compared to the fourbar mechanism.
c Compare the results from part and part
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock