

Question: Please make a Matlab code for just e . ) using corke matlab robotics toolbox. funct rpy 2 tr ( ) and transl ( )
Please make a Matlab code for just e using corke matlab robotics toolbox. funct rpytr and transl i already did ad MATLAB EXERCISE B
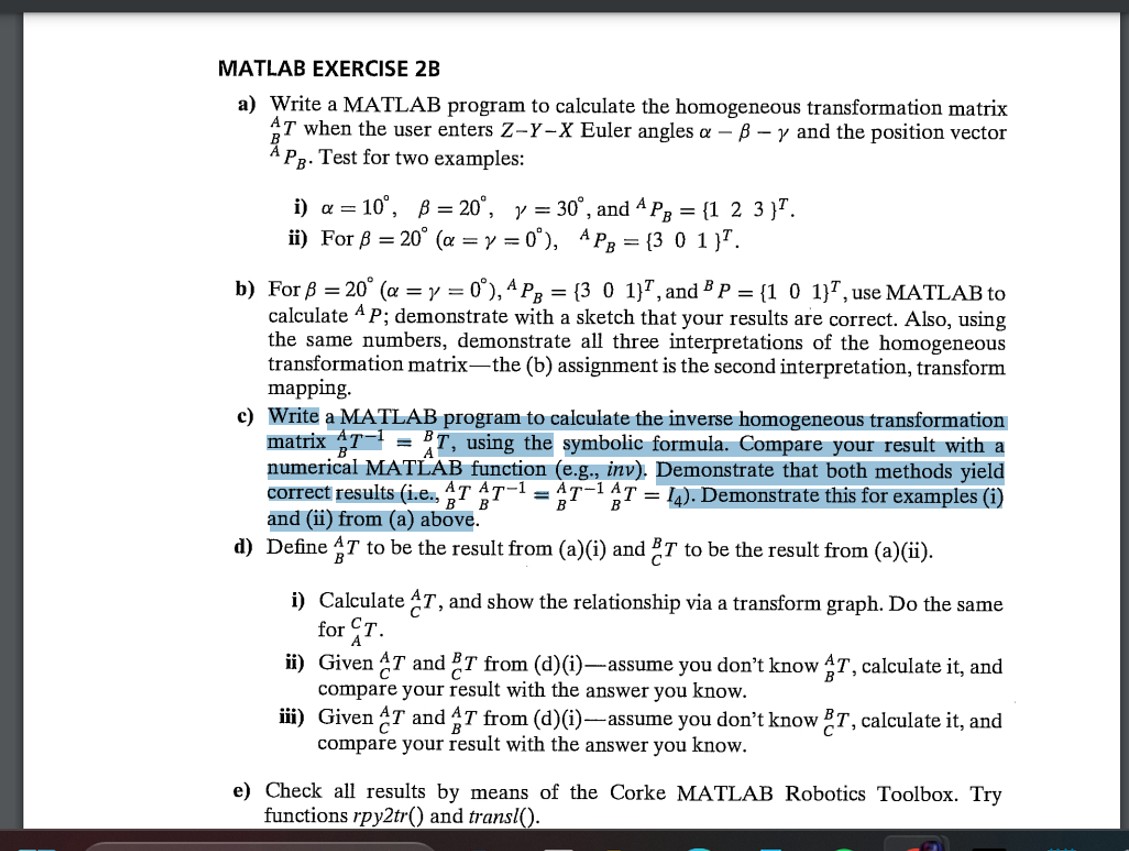
a Write a MATLAB program to calculate the homogeneous transformation matrix
when the user enters Euler angles and the position vector
Test for two examples:
i and
ii For
b For and use MATLAB to
calculate ; demonstrate with a sketch that your results are correct. Also, using
the same numbers, demonstrate all three interpretations of the homogeneous
transformation matrix the b assignment is the second interpretation, transform
mapping.
c Write a MATLAB program to calculate the inverse homogeneous transformation
matrix using the symbolic formula. Compare your result with a
numerical MATLAB function eg inv Demonstrate that both methods yield
correct results ie Demonstrate this for examples i
and ii from a above.
d Define to be the result from ai and to be the result from aii
i Calculate and show the relationship via a transform graph. Do the same
for
ii Given and from diassume you don't know calculate it and
compare your result with the answer you know.
iii Given and from diassume you don't know calculate it and
compare your result with the answer you know.
e Check all results by means of the Corke MATLAB Robotics Toolbox. Try
functions and transl
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock