

Question: please make sure to answer part (i)-(iv) thanks. A computer vision engineer calibrates a camera resulting in the following intrinsic and extrinsic matrices, (570.05 0
please make sure to answer part (i)-(iv) thanks.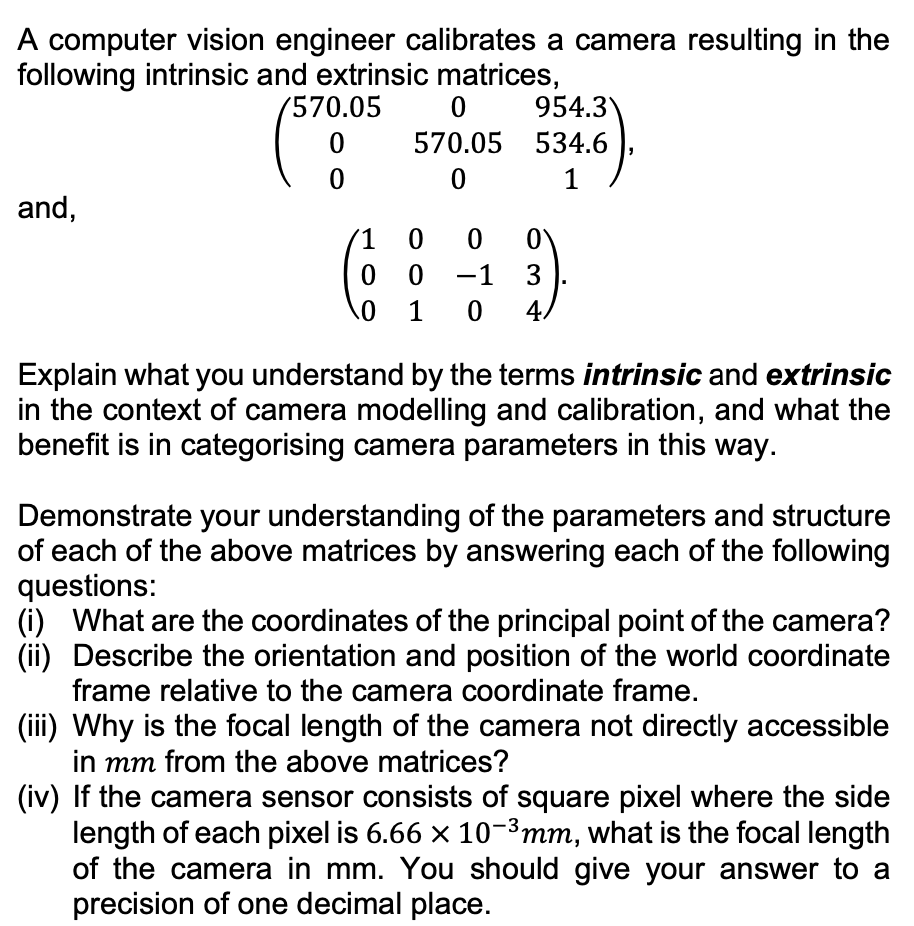
A computer vision engineer calibrates a camera resulting in the following intrinsic and extrinsic matrices, (570.05 0 954.3 0 570.05 534.6 0 0 1 and, 1 0 0 0 0 0 -1 3 0 1 0 4 Explain what you understand by the terms intrinsic and extrinsic in the context of camera modelling and calibration, and what the benefit is in categorising camera parameters in this way. Demonstrate your understanding of the parameters and structure of each of the above matrices by answering each of the following questions: (i) What are the coordinates of the principal point of the camera? (ii) Describe the orientation and position of the world coordinate frame relative to the camera coordinate frame. (iii) Why is the focal length of the camera not directly accessible in mm from the above matrices? (iv) If the camera sensor consists of square pixel where the side length of each pixel is 6.66 x 10-3mm, what is the focal length of the camera in mm. You should give your answer to a precision of one decimal place
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts