

Question: Please post the code from python I uploaded the question and the answer HW3.7. Find the pose of the end-effector frame for a robot with
Please post the code from python I uploaded the question and the answer
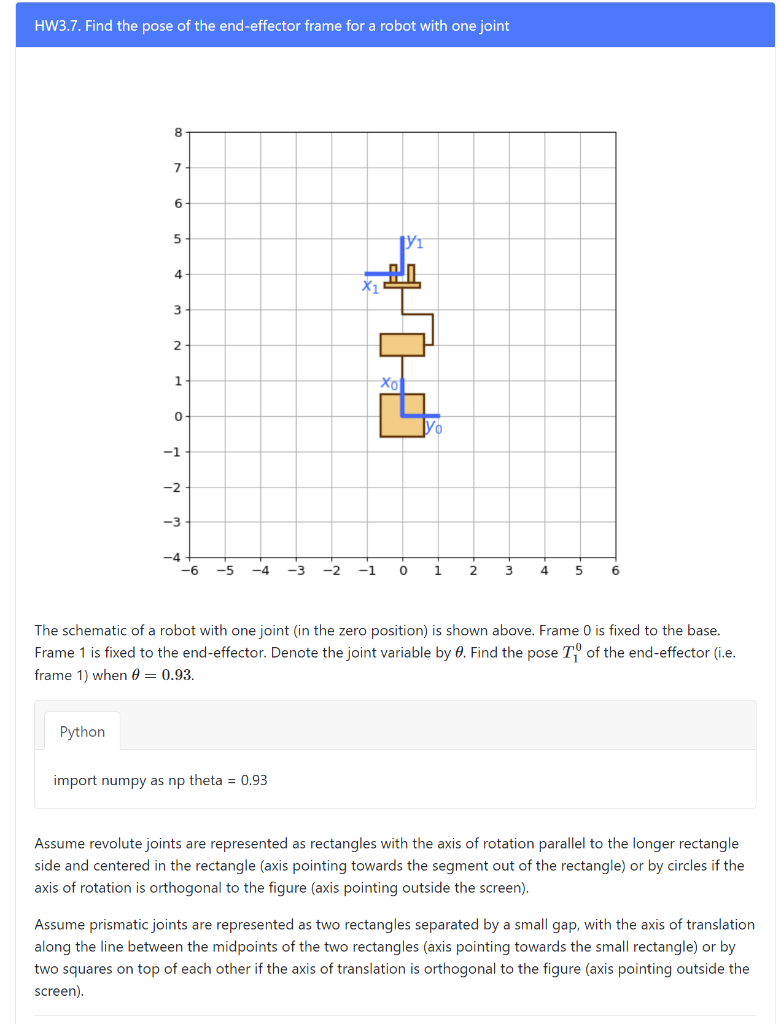
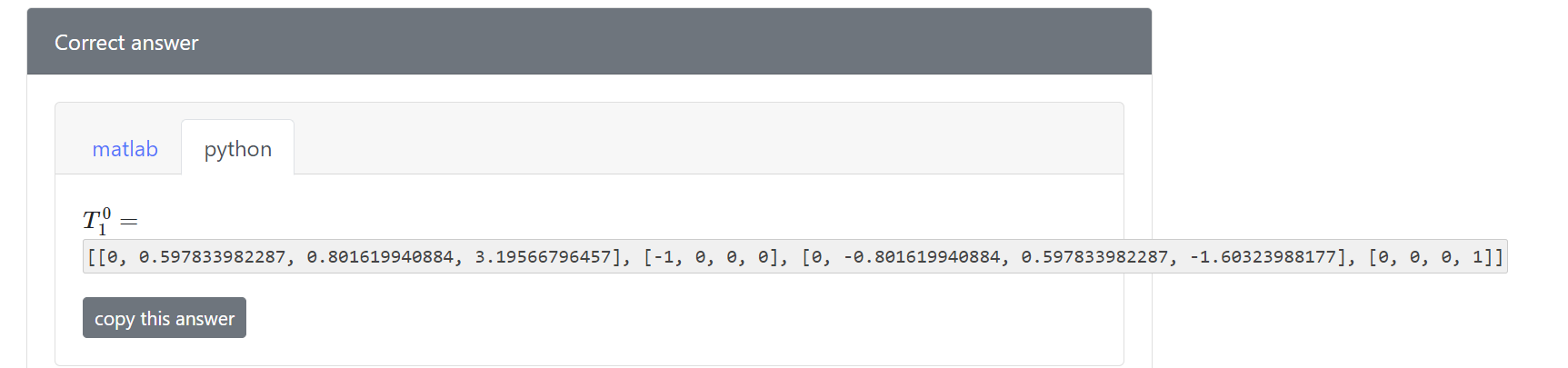
HW3.7. Find the pose of the end-effector frame for a robot with one joint The schematic of a robot with one joint (in the zero position) is shown above. Frame 0 is fixed to the base. Frame 1 is fixed to the end-effector. Denote the joint variable by . Find the pose T10 of the end-effector (i.e. frame 1) when =0.93. Python import numpy as np theta =0.93 Assume revolute joints are represented as rectangles with the axis of rotation parallel to the longer rectangle side and centered in the rectangle (axis pointing towards the segment out of the rectangle) or by circles if the axis of rotation is orthogonal to the figure (axis pointing outside the screen). Assume prismatic joints are represented as two rectangles separated by a small gap, with the axis of translation along the line between the midpoints of the two rectangles (axis pointing towards the small rectangle) or by two squares on top of each other if the axis of translation is orthogonal to the figure (axis pointing outside the screen). Correct answer matlab python T10=[[,.597833982287,.801619940884,3.19566796457],[1,,,],[,.801619940884,.597833982287,1.60323988177],[,,,1]] copy this
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts