

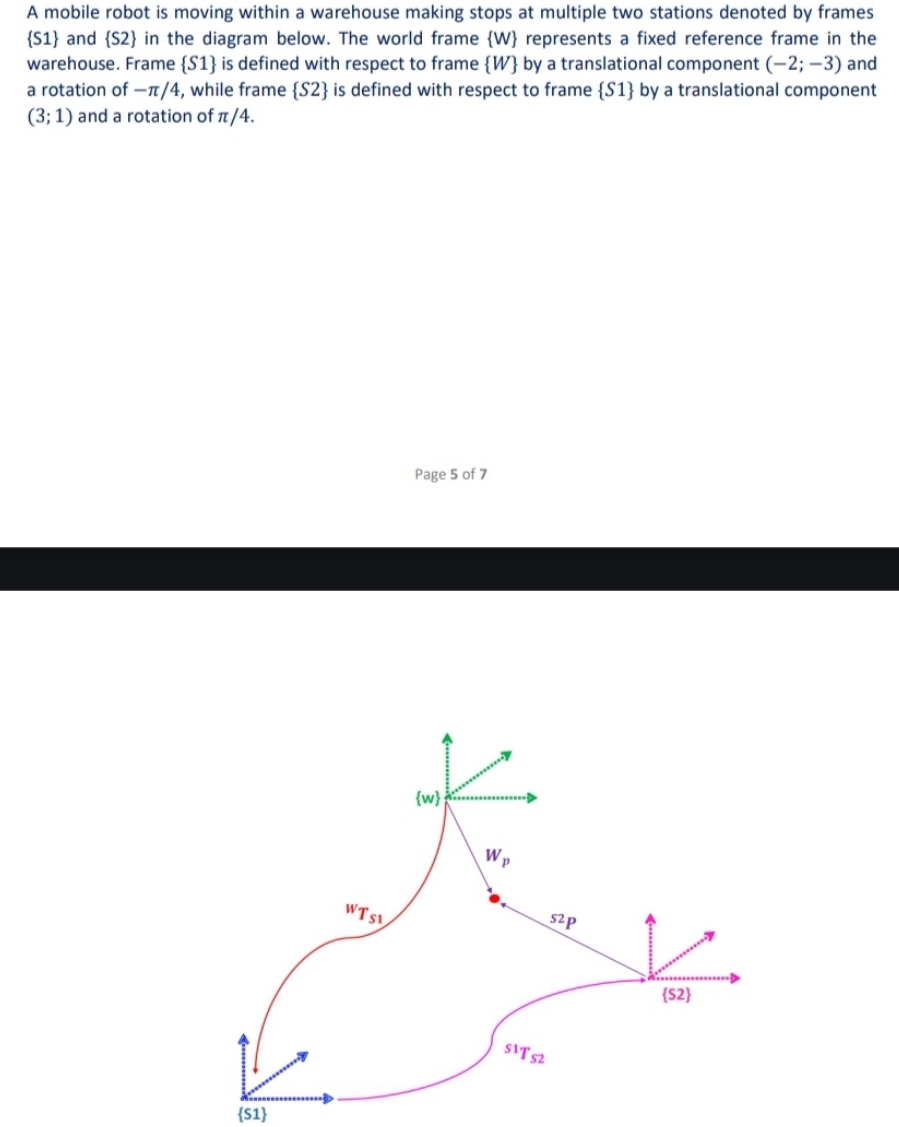
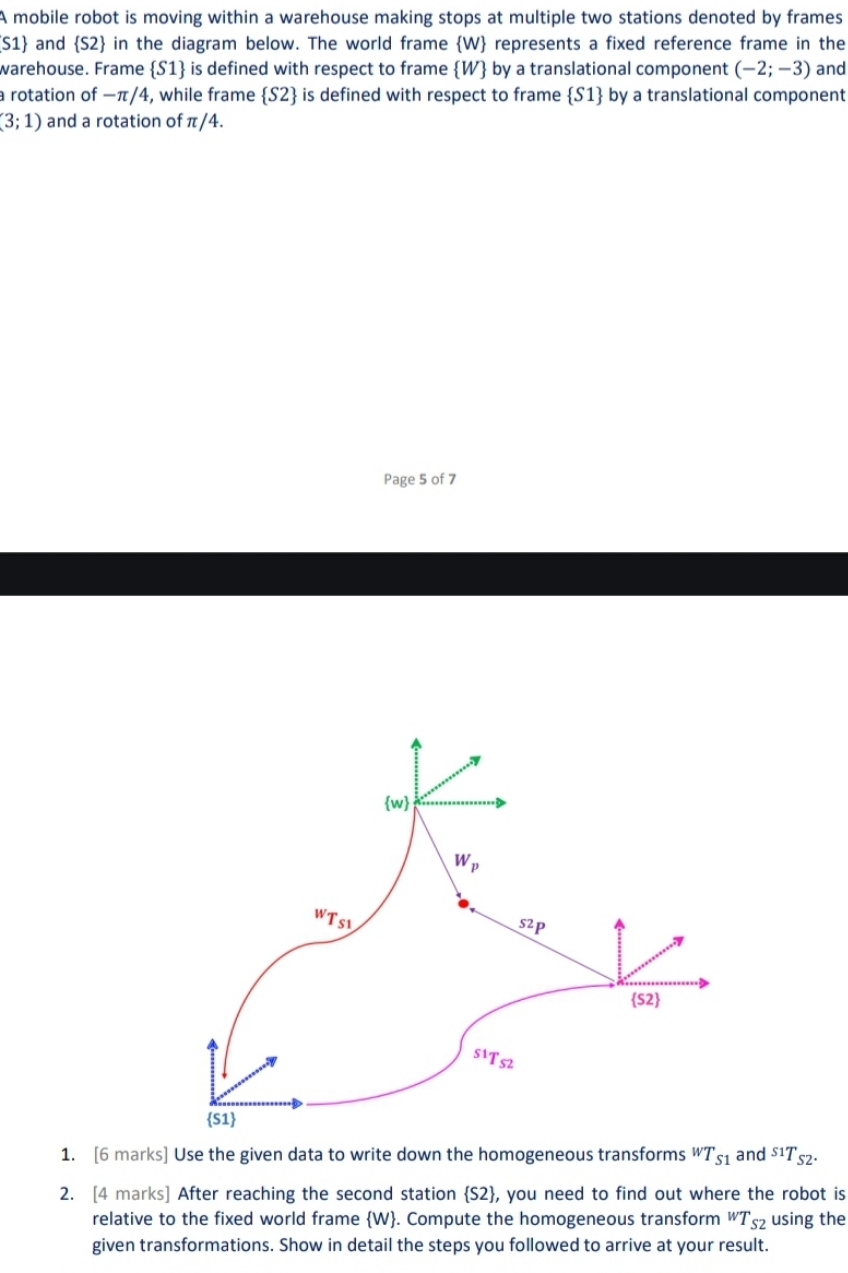
Question: Please see an attachment for detailswhat information is missing? . . A mobile robot is moving within a warehouse making stops at multiple two stations
Please see an attachment for detailswhat information is missing?
.
.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock