

Question: PLEASE SHOW HOW EQUATION 4 . 5 WAS DETERMINED EXAMPLE 4 . 2 Give a description of the subspace of ? 2 0 T for
PLEASE SHOW HOW EQUATION WAS DETERMINED
EXAMPLE
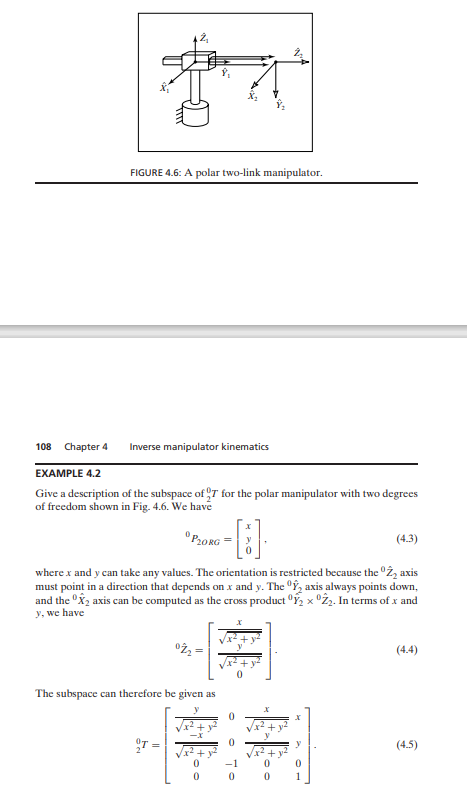
Give a description of the subspace of for the polar manipulator with two degrees
of freedom shown in Fig. We have
where and can take any values. The orientation is restricted because the hat axis
must point in a direction that depends on and The hat axis always points down,
and the hat axis can be computed as the cross product hathat In terms of and
we have
The subspace can therefore be given as
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock