

Question: Plz answer quick # Question 2) (2.5 marks) a) Suppose we desire to place the origin of the hand frame of a cylindrical rob Calculate
Plz answer quick #
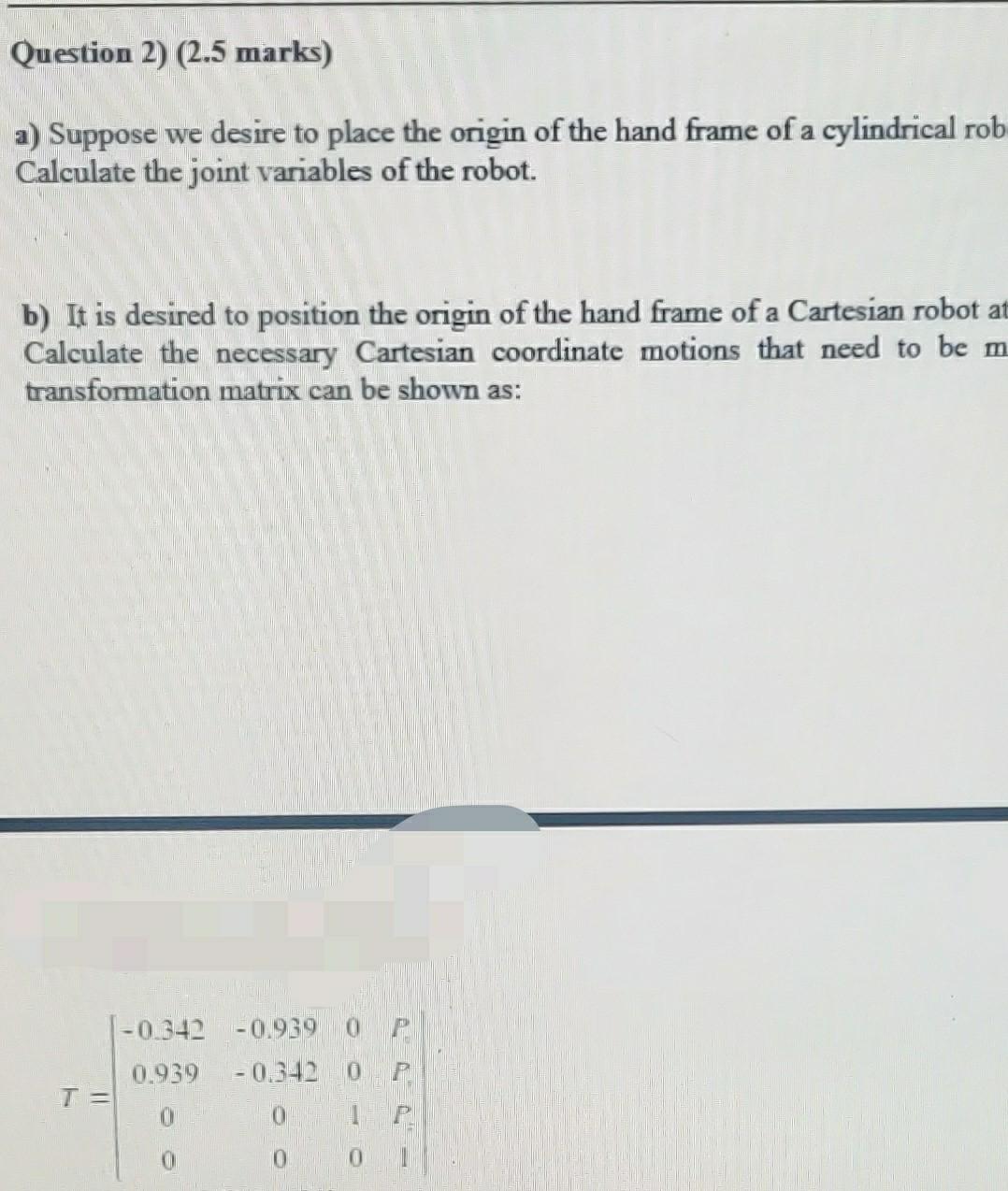
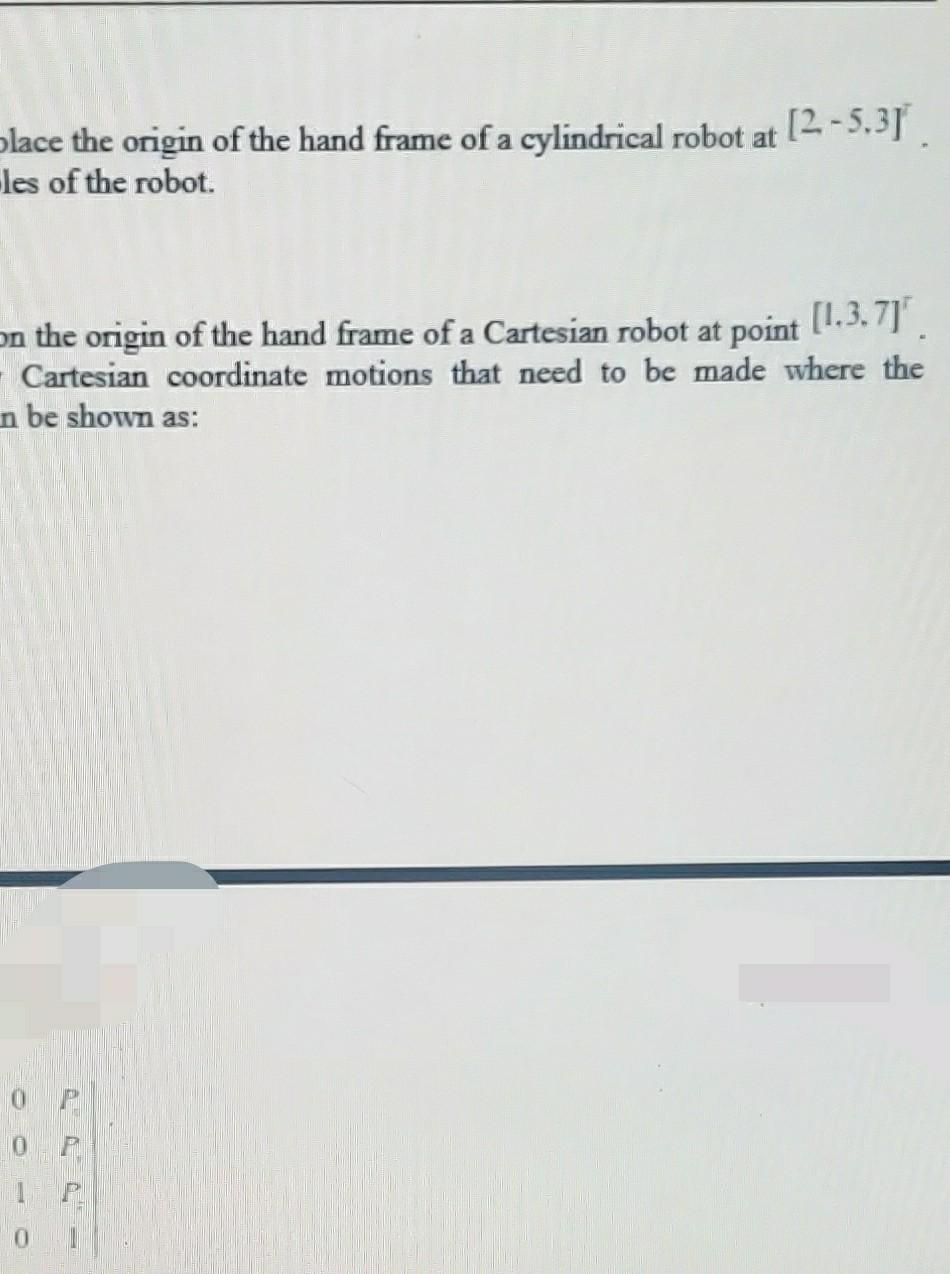
Question 2) (2.5 marks) a) Suppose we desire to place the origin of the hand frame of a cylindrical rob Calculate the joint variables of the robot. b) It is desired to position the origin of the hand frame of a Cartesian robot at Calculate the necessary Cartesian coordinate motions that need to be m transformation matrix can be shown as: -0.342 -0.939 0 P 0.939 - 0.342 0 0 P 0 0 0 place the origin of the hand frame of a cylindrical robot at [2-5.31 les of the robot on the origin of the hand frame of a Cartesian robot at point [1.3.7)" - Cartesian coordinate motions that need to be made where the n be shown as: O P OP 1 0 Question 2) (2.5 marks) a) Suppose we desire to place the origin of the hand frame of a cylindrical rob Calculate the joint variables of the robot. b) It is desired to position the origin of the hand frame of a Cartesian robot at Calculate the necessary Cartesian coordinate motions that need to be m transformation matrix can be shown as: -0.342 -0.939 0 P 0.939 - 0.342 0 0 P 0 0 0 place the origin of the hand frame of a cylindrical robot at [2-5.31 les of the robot on the origin of the hand frame of a Cartesian robot at point [1.3.7)" - Cartesian coordinate motions that need to be made where the n be shown as: O P OP 1 0
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts