

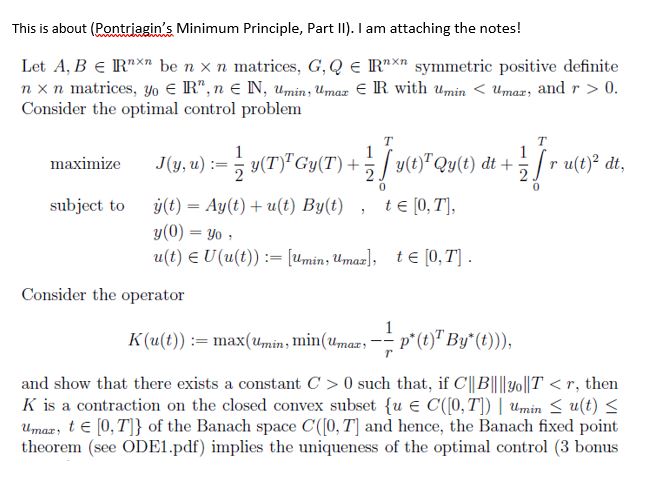
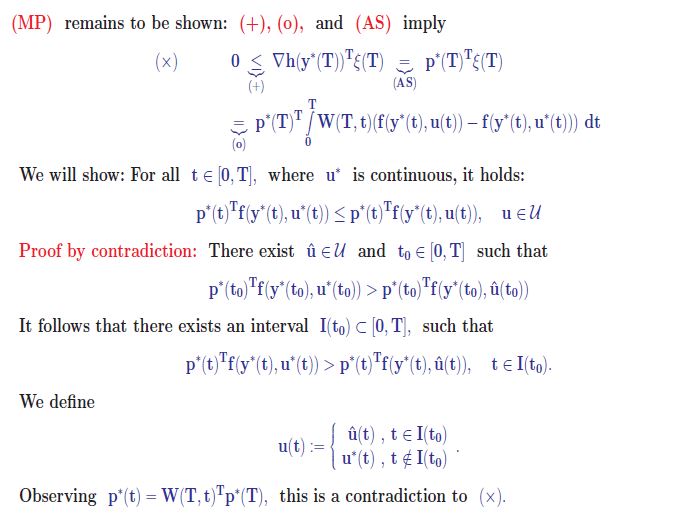
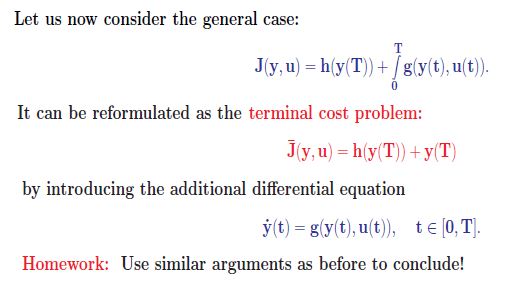
Question: (Pontrjagin's Minimum Principle, Part II). Optimization course , Related Notes are attached! This is about (Pontriagin's Minimum Principle, Part II). I am attaching the notes!
(Pontrjagin's Minimum Principle, Part II). Optimization course , Related Notes are attached!
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock