

Question: PRACTICE TASK Objectives: 1 . To be familiar with Robot Operating System ( ROS ) 2 . To program a simulated robot to implement a
PRACTICE TASK
Objectives:
To be familiar with Robot Operating System ROS
To program a simulated robot to implement a specific navigation task below
Main task:
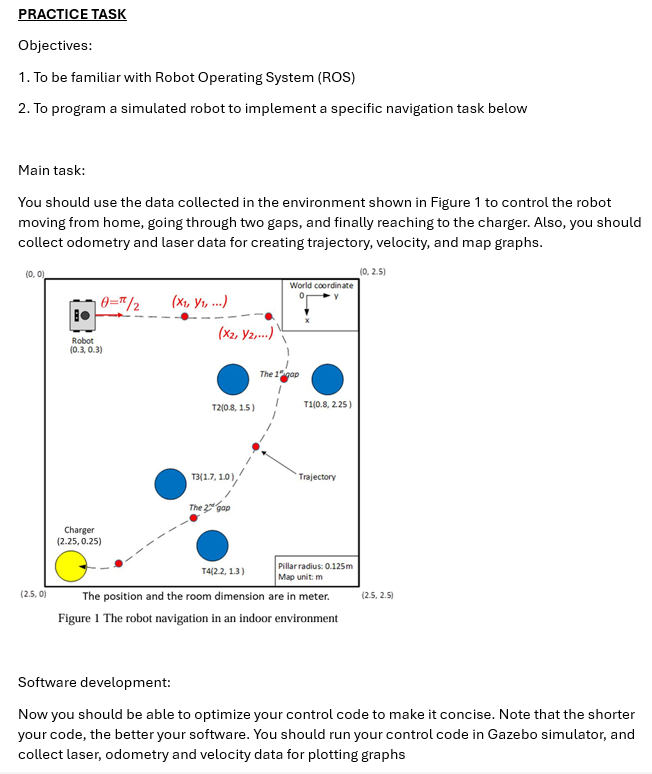
You should use the data collected in the environment shown in Figure to control the robot moving from home, going through two gaps, and finally reaching to the charger. Also, you should collect odometry and laser data for creating trajectory, velocity, and map graphs.
Figure The robot navigation in an indoor environment
Software development:
Now you should be able to optimize your control code to make it concise. Note that the shorter your code, the better your software. You should run your control code in Gazebo simulator, and collect laser, odometry and velocity data for plotting graphs
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock