

Question: Problem 1 (10 points): Consider a simplified mobile robot represented by the integrator: where r, is the r-axis position, and r2 is the y-axis position.
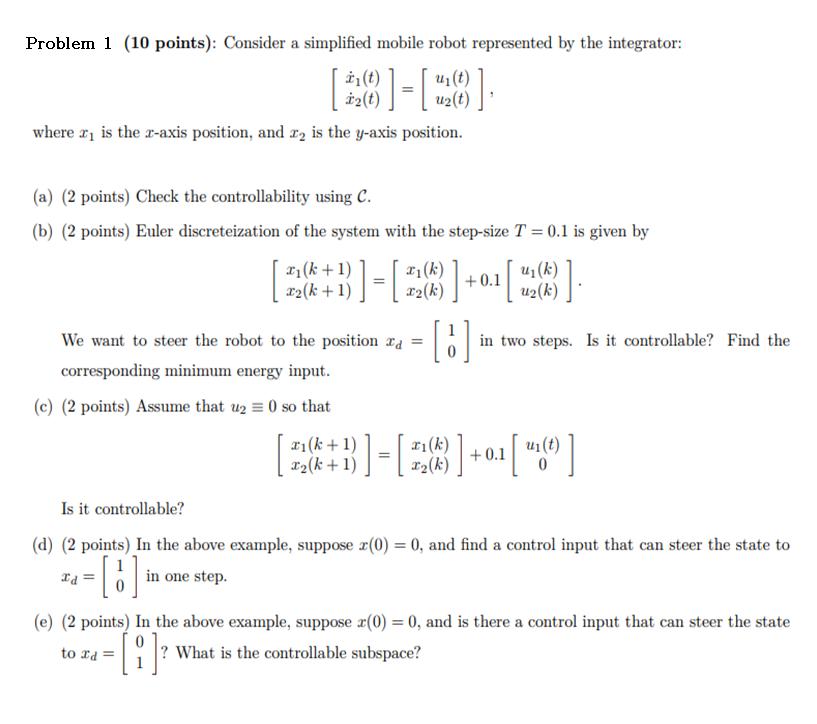
Problem 1 (10 points): Consider a simplified mobile robot represented by the integrator: where r, is the r-axis position, and r2 is the y-axis position. (a) (2 points) Check the controllability using C. (b) (2 points) Euler discreteization of the system with the step-size T = 0.1 is given by We want to steer the robot to the position Id = in two steps. Is it controllable? Find the corresponding minimum energy input. (c) (2 points) Assume that u2 = 0 so that 21(k + 1) ] T2(k + 1) = *2 (K) + 0.1 21() Is it controllable? (d) (2 points) In the above example, suppose r(0) = 0, and find a control input that can steer the state to Id in one step. (e) (2 points) In the above example, suppose r(0) = 0, and is there a control input that can steer the state to Id = What is the controllable subspace
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts