

Question: Problem 1 . ( 2 0 points ) ( a ) Construct a Simulink model of the helicopter control system shown in the figure below.
Problem points
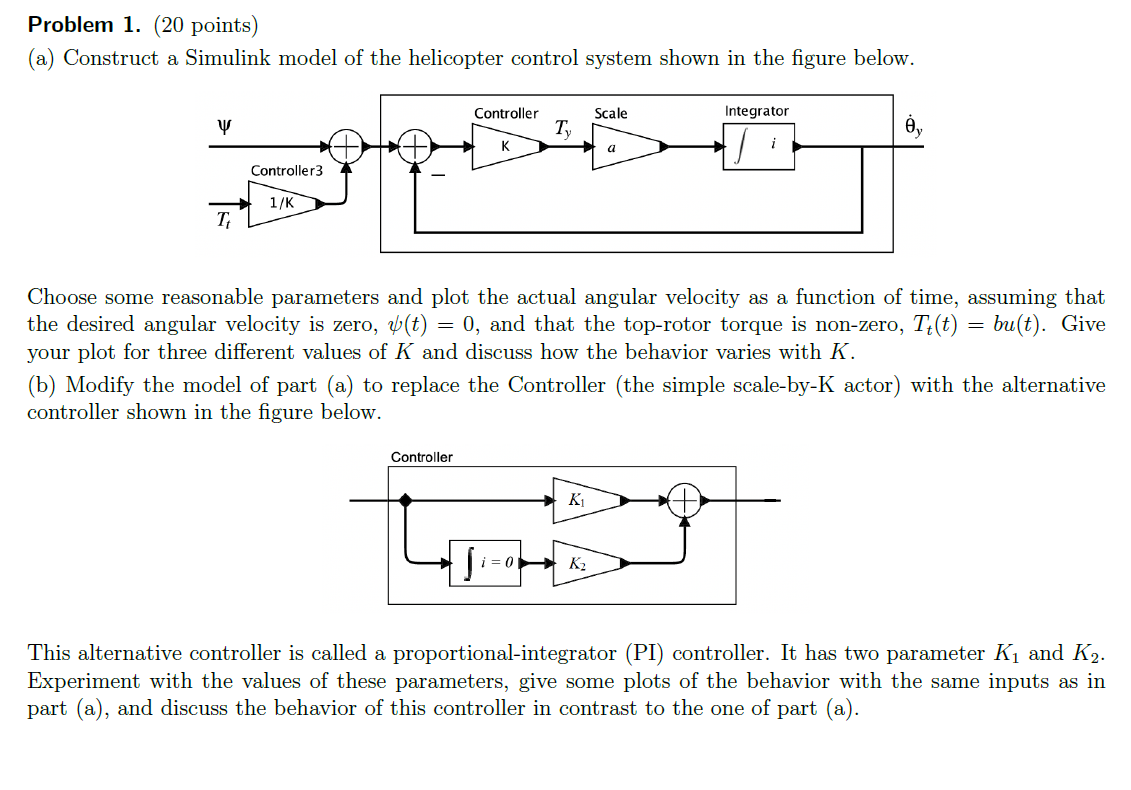
a Construct a Simulink model of the helicopter control system shown in the figure below.
Choose some reasonable parameters and plot the actual angular velocity as a function of time, assuming that
the desired angular velocity is zero, and that the toprotor torque is nonzero, Give
your plot for three different values of and discuss how the behavior varies with
b Modify the model of part a to replace the Controller the simple scalebyK actor with the alternative
controller shown in the figure below.
This alternative controller is called a proportionalintegrator PI controller. It has two parameter and
Experiment with the values of these parameters, give some plots of the behavior with the same inputs as in
part a and discuss the behavior of this controller in contrast to the one of part a
The question is from course Embedded and Cyber Physical System.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock