

Question: Problem 1 . ( 2 0 pts ) Suppose a two - wheel differential drive mobile robot equipped with a 2 D range sensor starts
Problem pts Suppose a twowheel differential drive mobile robot equipped with a D
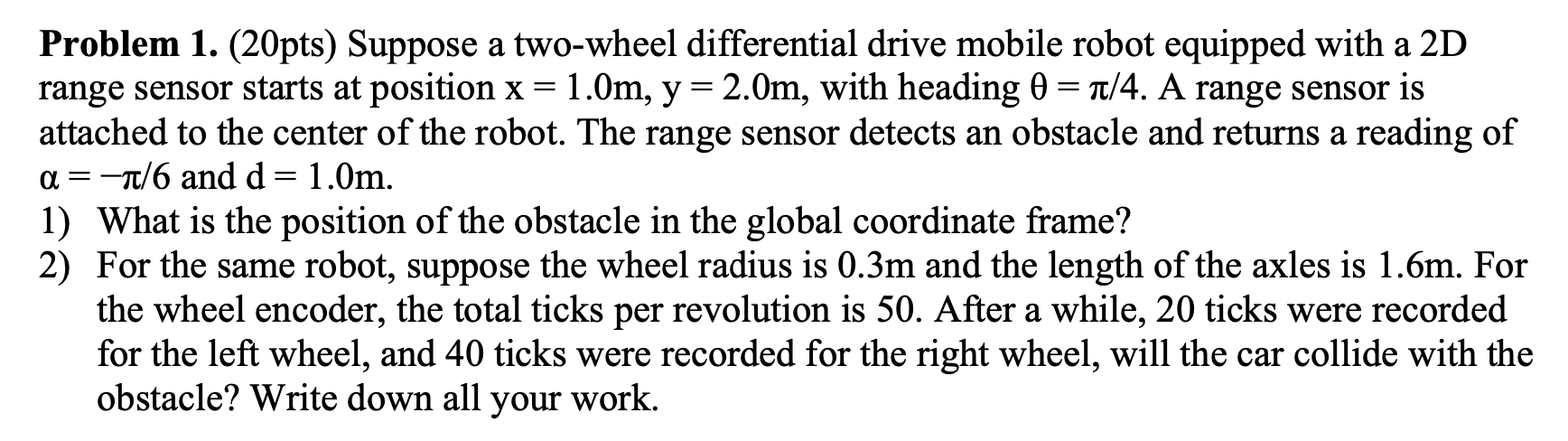
range sensor starts at position with heading A range sensor is
attached to the center of the robot. The range sensor detects an obstacle and returns a reading of
and
What is the position of the obstacle in the global coordinate frame?
For the same robot, suppose the wheel radius is m and the length of the axles is m For
the wheel encoder, the total ticks per revolution is After a while, ticks were recorded
for the left wheel, and ticks were recorded for the right wheel, will the car collide with the
obstacle? Write down all your work.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock