

Question: Problem 1: Consider the following 2D robot motion planning problem, which shows the start location and goal location of a robot, and a set of
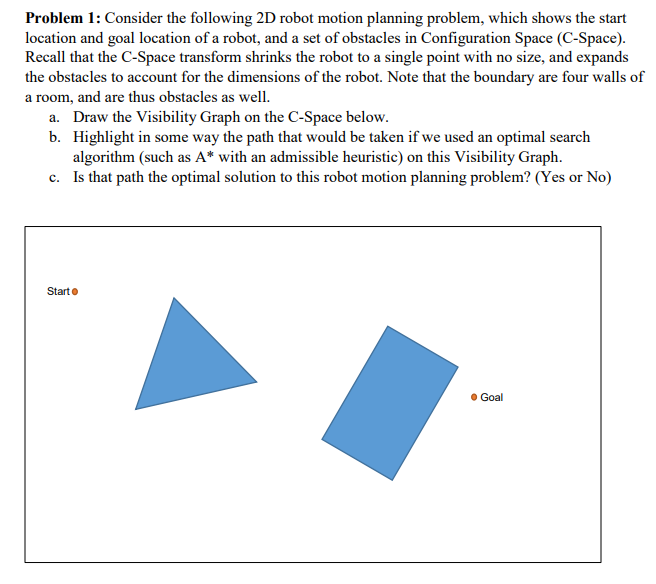
Problem 1: Consider the following 2D robot motion planning problem, which shows the start location and goal location of a robot, and a set of obstacles in Configuration Space (C-Space). Recall that the C-Space transform shrinks the robot to a single point with no size, and expands the obstacles to account for the dimensions of the robot. Note that the boundary are four walls of a room, and are thus obstacles as well. a. Draw the Visibility Graph on the C-Space below. b. Highlight in some way the path that would be taken if we used an optimal search algorithm (such as A* with an admissible heuristic) on this Visibility Graph. c. Is that path the optimal solution to this robot motion planning problem? (Yes or No) Start Goal
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts