

Question: Problem 1 In this problem, we will design an abstract Finite State Machine for controlling a robot that locates and collects tennis balls. Note that
Problem
In this problem, we will design an abstract Finite State Machine for controlling a robot that locates and collects tennis balls. Note that this problem is greatly simplified and does not consider all the realworld scenarios, for example, those could occur for the maze in the competition lab.
Pick up Ball
Go Left
Go Right
Go Forward
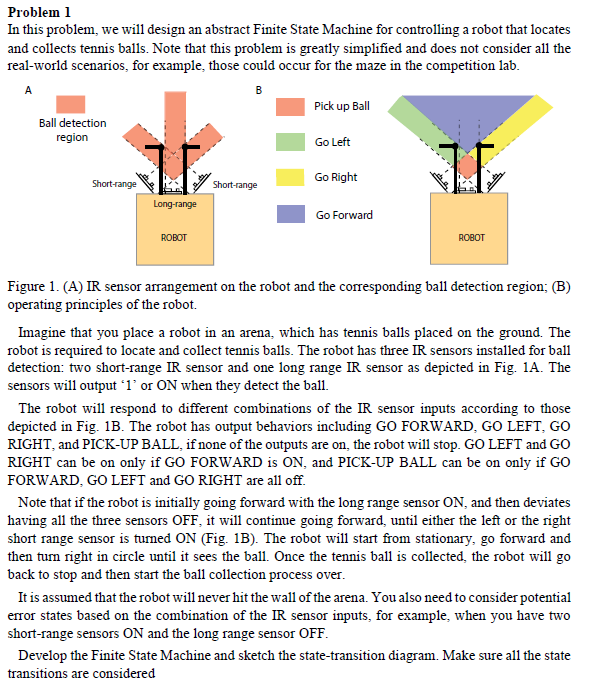
Figure A IR sensor arrangement on the robot and the corresponding ball detection region; B
operating principles of the robot. Imagine that you place a robot in an arena, which has tennis balls placed on the ground. The robot is required to locate and collect tennis balls. The robot has three IR sensors installed for ball detection: two shortrange IR sensor and one long range IR sensor as depicted in Fig. A The sensors will output or ON when they detect the ball. The robot will respond to different combinations of the IR sensor inputs according to those depicted in Fig. B The robot has output behaviors including GO FORWARD, GO LEFT, GO RIGHT, and PICKUP BALL, if none of the outputs are on the robot will stop. GO LEFT and GO RIGHT can be on only if GO FORWARD is ON and PICKUP BALL can be on only if GO FORWARD, GO LEFT and GO RIGHT are all off.
Note that if the robot is initially going forward with the long range sensor and then deviates having all the three sensors OFF, it will continue going forward, until either the left or the right short range sensor is turned ON FigB The robot will start from stationary, go forward and then turn right in circle until it sees the ball. Once the tennis ball is collected, the robot will go back to stop and then start the ball collection process over. It is assumed that the robot will never hit the wall of the arena. You also need to consider potential error states based on the combination of the IR sensor inputs, for example, when you have two shortrange sensors and the long range sensor OFF.
Develop the Finite State Machine and sketch the statetransition diagram. Make sure all the state transitions are considered
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock