

Question: Problem 1 : Path Planning Given the following discrete map, where: R denotes the robot's initial position 1 denotes an inaccessible cell 2 denotes the
Problem : Path Planning
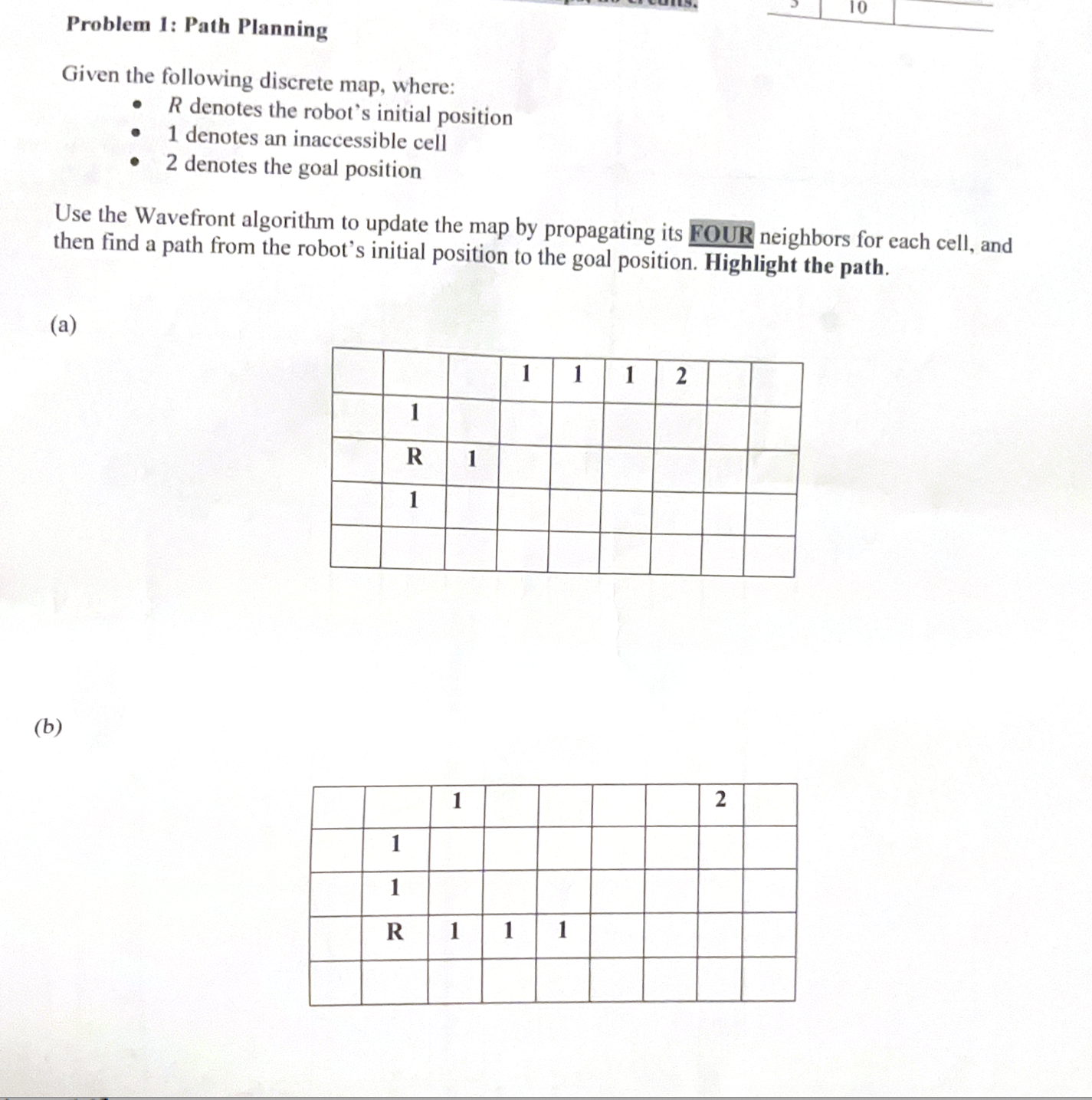
Given the following discrete map, where:
denotes the robot's initial position
denotes an inaccessible cell
denotes the goal position
Use the Wavefront algorithm to update the map by propagating its FOUR neighbors for each cell, and
then find a path from the robot's initial position to the goal position. Highlight the path.
a
b Please fill out the table by its four neighbors for each cell.Last time I submitted they didn't provide the table.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock