

Question: Problem 2 Consider a translational mechanical system is shown below. Note that M 3 is NOT massless. ( a ) The equation of motion for
Problem Consider a translational mechanical system is shown below. Note that is NOT massless.
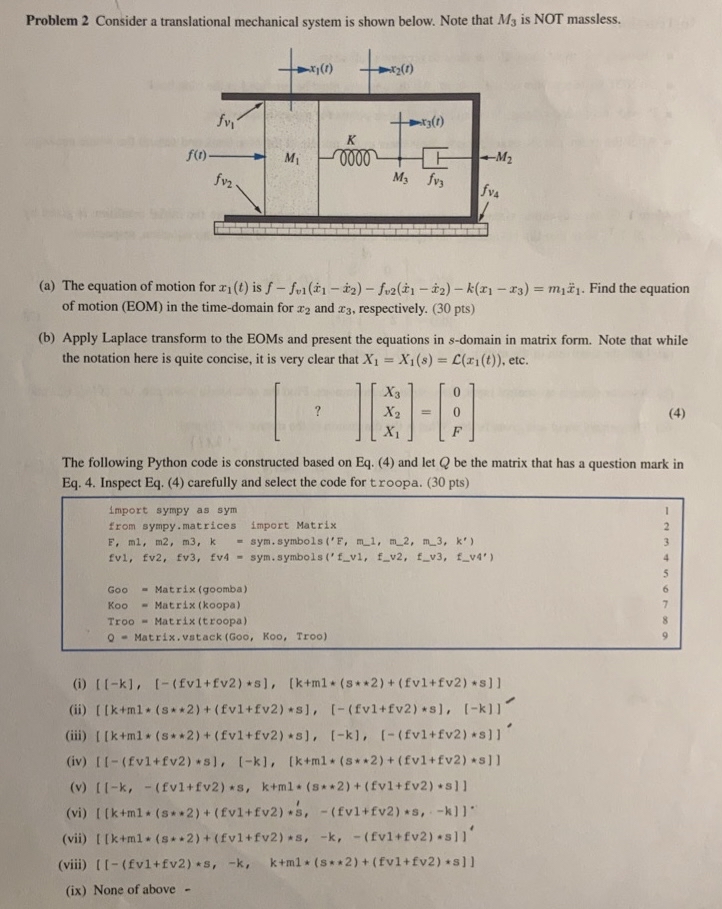
a The equation of motion for is Find the equation of motion EOM in the timedomain for and respectively. pts
b Apply Laplace transform to the EOMs and present the equations in domain in matrix form. Note that while the notation here is quite concise, it is very clear that etc.
The following Python code is constructed based on Eq and let be the matrix that has a question mark in Eq Inspect Eq carefully and select the code for troopa. pts
tableImport sympy as symErom sympymatrices import Matrix,fv fv fv fv symsymbolsfv fv fv fvGoo MatrixgoombaKoo Matrix koopaTroo MatrixtroopaQ Matrix.vstack Goo Koo, Troo
i
ii
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock