

Question: Problem 2 Consider the linear dynamic model for our 1 D mobile robot from class: [ x 1 x 2 ] = [ 0 1
Problem
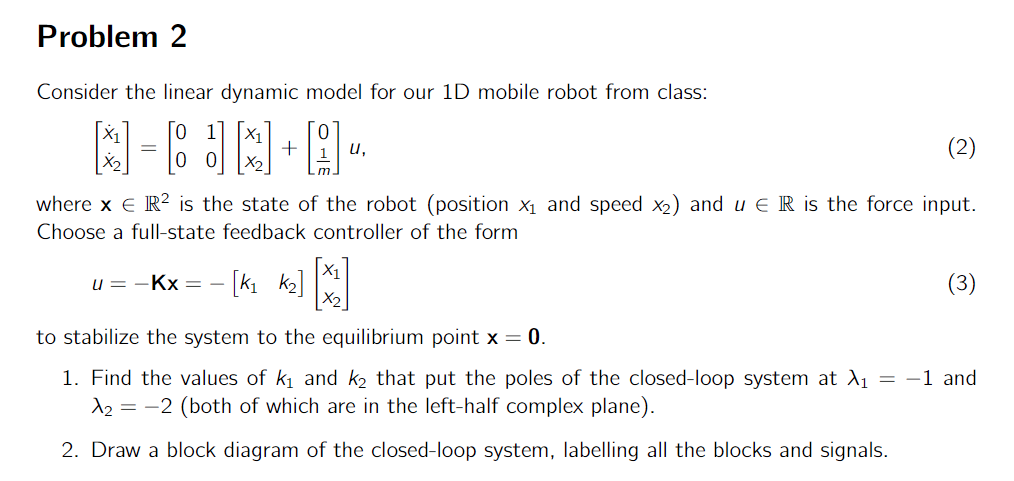
Consider the linear dynamic model for our D mobile robot from class:
where is the state of the robot position and speed and uinR is the force input.
Choose a fullstate feedback controller of the form
to stabilize the system to the equilibrium point
Find the values of and that put the poles of the closedloop system at and
both of which are in the lefthalf complex plane
Draw a block diagram of the closedloop system, labelling all the blocks and signals.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock