

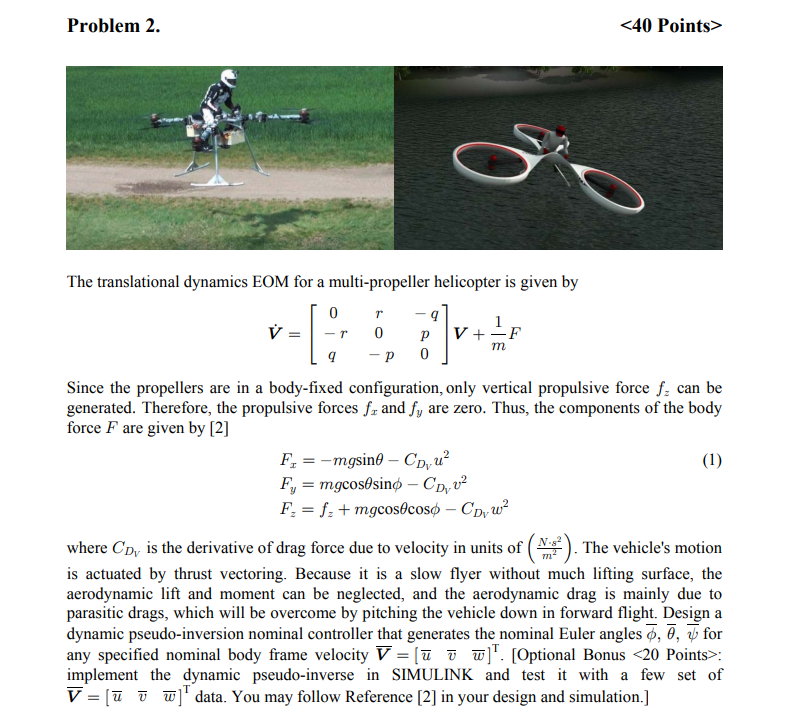
Question: Problem 2. The translational dynamics EOM for a multi-propeller helicopter is given by 0 T q 1 V=|-r 0 p |V+F m g p 0O
![given by [2] F, = mgsinfl Cgl.uz (1) F, = mgeos#sing Cp,](https://dsd5zvtm8ll6.cloudfront.net/si.experts.images/questions/2024/11/672f08a05ff94_648672f08a03cedd.jpg)
![v* F. = f. + mgcosficosgp C'E,].u.-2 where C'p,, is . The](https://dsd5zvtm8ll6.cloudfront.net/si.experts.images/questions/2024/11/672f08a0f2e10_648672f08a0cefd0.jpg)
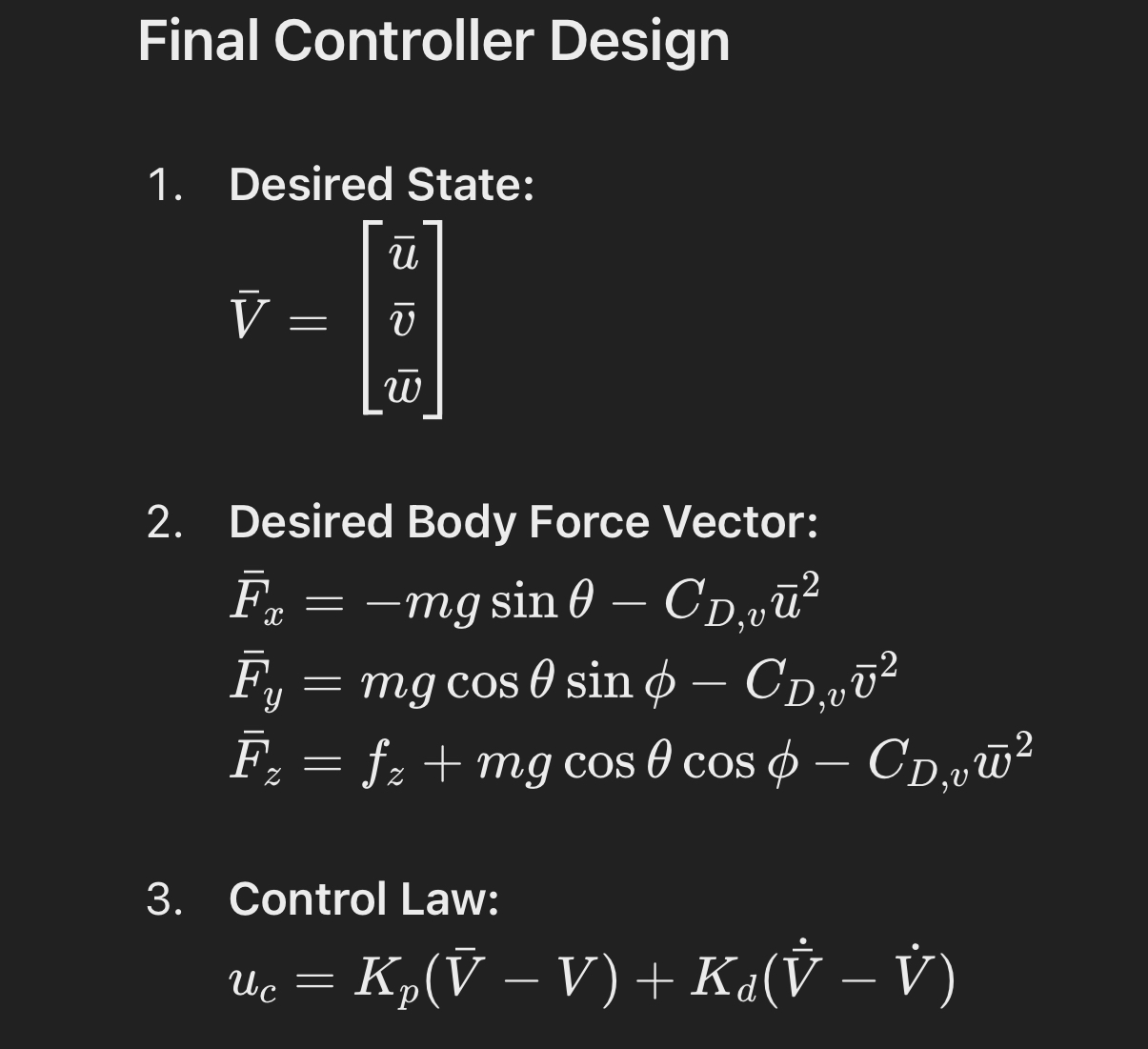
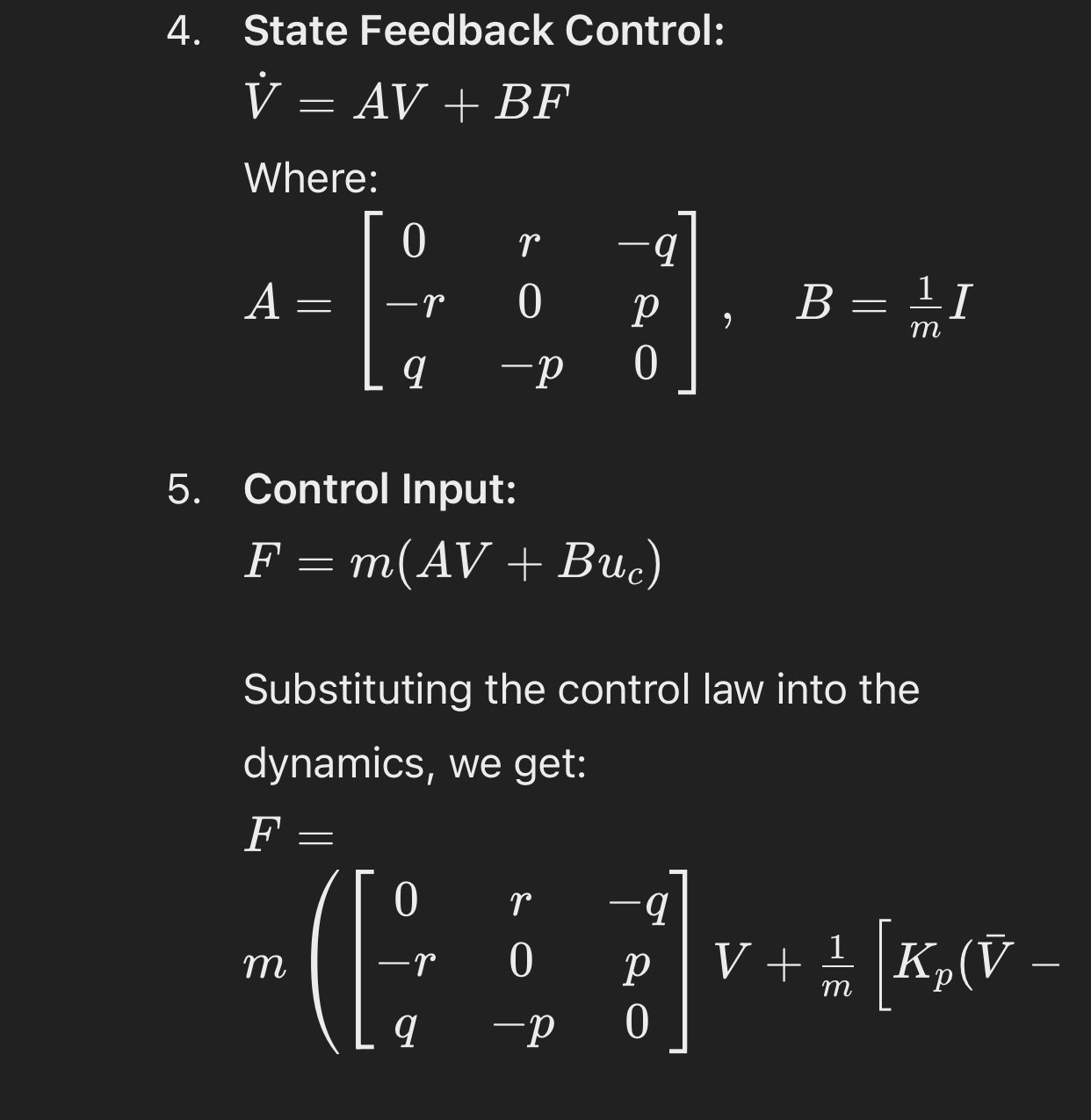
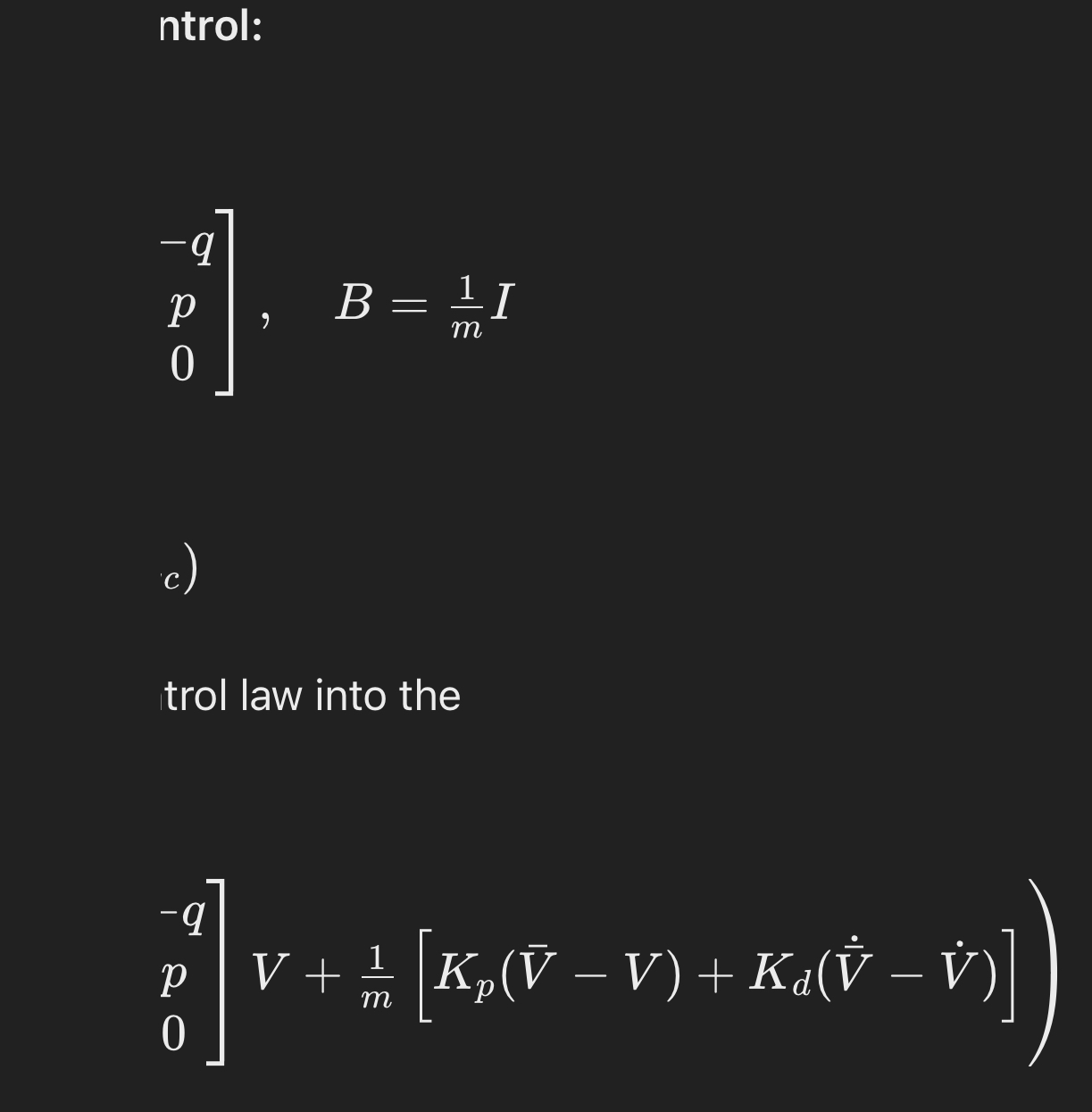
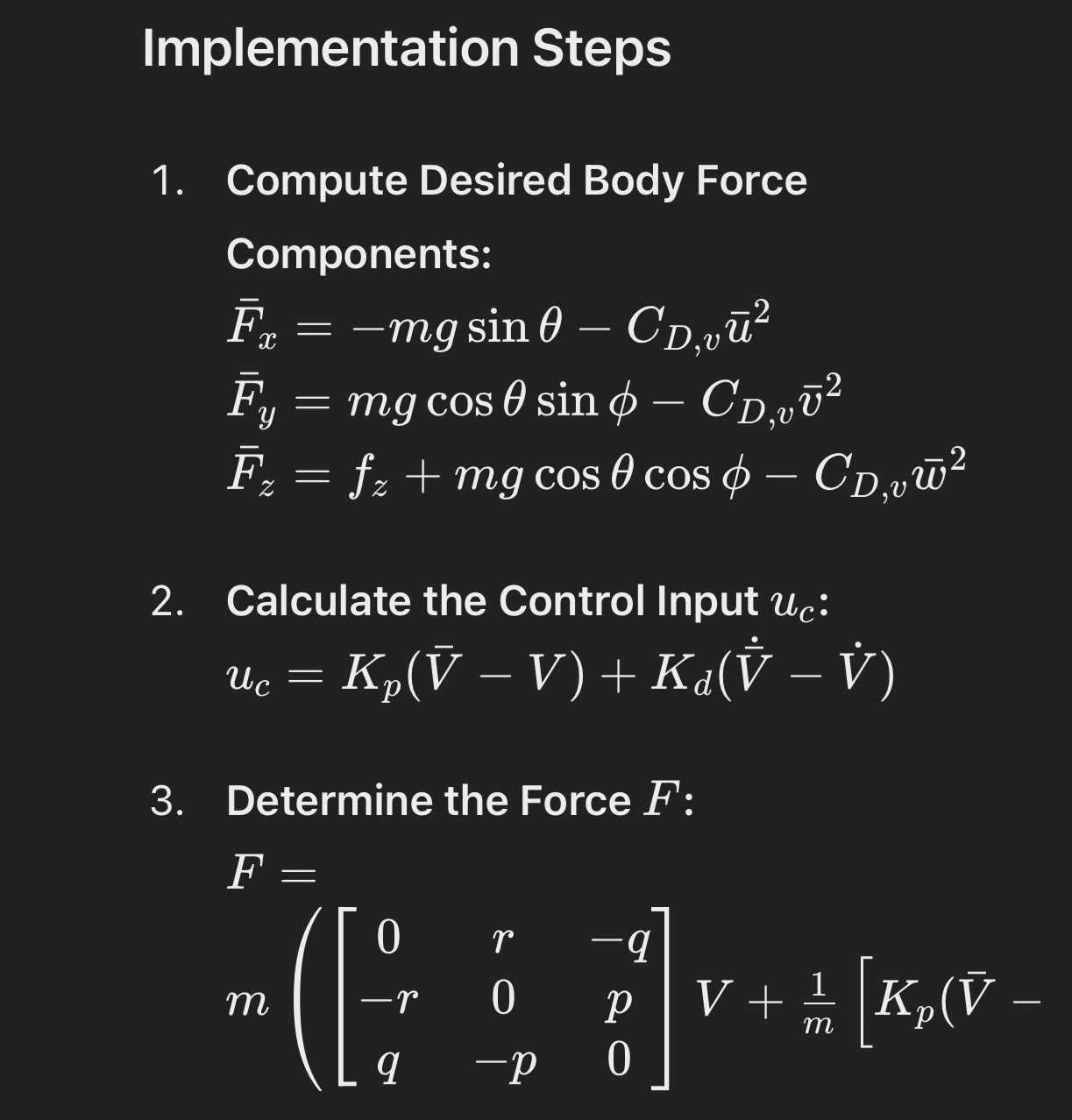
Problem 2. The translational dynamics EOM for a multi-propeller helicopter is given by 0 T q 1 V=|-r 0 p |V+F m g p 0O Since the propellers are in a body-fixed configuration, only vertical propulsive force f. can be generated. Therefore, the propulsive forces [ and f, are zero. Thus, the components of the body force F are given by [2] F, = mgsinfl Cgl.uz (1) F, = mgeos#sing Cp, v* F. = f. + mgcosficosgp C'E,].u.-2 where C'p,, is . The vehicle's motion is actuated by thrust vectoring. Because it is a slow flyer without much lifting surface, the aerodynamic lift and moment can be neglected, and the aerodynamic drag is mainly due to parasitic drags, which will be overcome by pitching the vehicle down in forward flight. Design a dynamic pseudo-inversion nominal controller that generates the nominal Euler angles , 8, 1 for any specified nominal body frame velocity V = [u 7 w]'. [Optional Bonus : implement the dynarmc pseudo-inverse in SIMULINK and test it with a few set of V=[u 7 @ ] data. You may follow Reference [2] in your design and simulation.] Final Controller Design 1. Desired State: V = w 2. Desired Body Force Vector: Fx = -mg sin 0 - CD,vul Fy = mg cos 0 sino - CD,UV? Fz = fz + mg cos 0 cos & - CD.uw? 3. Control Law: Uc = Kp(V - V) + Ka(V - V)4. State Feedback Control: V = AV + BF Where: A= |-r /| Control Input: F =m(AV + Bu,) Substituting the control law into the dynamics, we get: F = \fImplementation Steps 1. Compute Desired Body Force Components: Fa = -mg sin 0 - CD,vul Fy = mg cos 0 sin & - CD,vv2 F2 = fz + mg cos 0 cos 4 - CD,uw2 2. Calculate the Control Input Uc: Uuc = Kp(V - V) + Ka(V - V) 3. Determine the Force F: F = m p V + K p (V m O p\fThis controller ensures the helicopter's velocities track the desired velocities by adjusting the propeller forces accordingly. The gains K, and K4 should be tuned to achieve the desired performance
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts