

Question: Problem 3 (45 pts) Consider a simplified planar drone with two rotors to provide thrusts, and its dynamical system is as illustrated below. 9
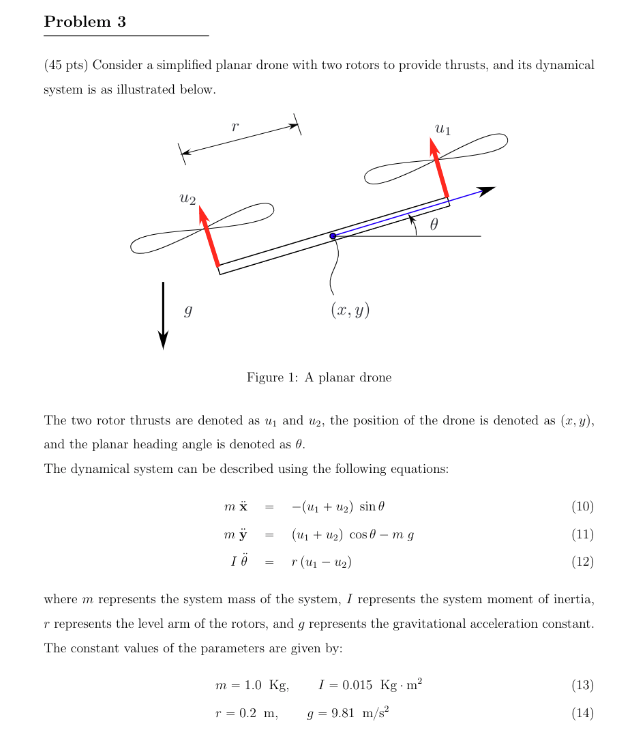

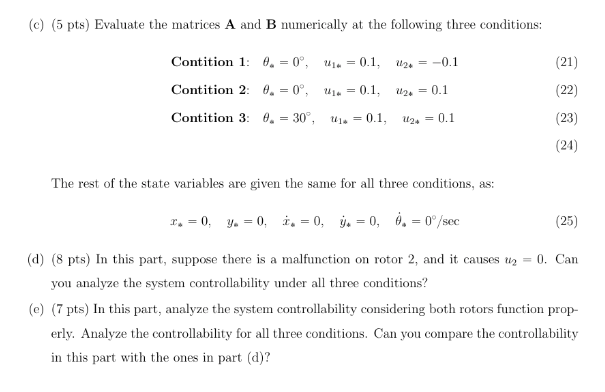
Problem 3 (45 pts) Consider a simplified planar drone with two rotors to provide thrusts, and its dynamical system is as illustrated below. 9 r (x, y) 11 Figure 1: A planar drone The two rotor thrusts are denoted as and 2, the position of the drone is denoted as (x, y), and the planar heading angle is denoted as 0. The dynamical system can be described using the following equations: -(+2) sin mx my - I = (u) cos mg (1-2) (10) (11) (12) where m represents the system mass of the system, I represents the system moment of inertia, r represents the level arm of the rotors, and g represents the gravitational acceleration constant. The constant values of the parameters are given by: m = 1.0 Kg, I = 0.015 Kg m r = 0.2 m, == g = 9.81 m/s (13) (14) Please answer the following questions: (a) (10 pts) Derive the state-space representation satisfying the following requirements. (i) The state vector x is chosen as: x = 0 x 0] (15) (ii) The system input is chosen as: = --[6] 142 (iii) The state-space representation should be in the format of: x= [(x,u) (x,u) f(x,u) f(x,u) f(x,u) f(x,u)] (16) (17) (iv) Please carry out the analytical expressions of fi(-), f2(), f3(-), fa(-), fs(), f6(-). You are encouraged to use the Matlab symbolic functions. (b) (15 pts) Derive the linearized model around a particular state x, and input u,. Namely, derive the matrices A, B in the following format: x-x, A (x-x,) + B(u-u,) Please carry out the analytical expressions of each element in A and B: (18) b11 b12 a11 12 13 14 15 16 021 022 023 024 025 026 b21 b22 b31 b32 A = 031 041 042 043 044 045 046 32 33 34 35 36 B = (19) 193 b41 b42 051 52 53 54 55 056 b51 b52 061 062 063 064 065 066 b61 b62 Note that dij and bij should be expressions of x. and u.: - aijaij (x, u.), bij bij (x, u) (20) (c) (5 pts) Evaluate the matrices A and B numerically at the following three conditions: Contition 1: 0.0, = 0.1, Contition 2: 0. =0, = 10.1, 12=-0.1 20.1 Contition 3: 0 = 30, 1 = 0.1, 24=0.1 (21) (22) (23) (24) The rest of the state variables are given the same for all three conditions, as: x=0, 0, 0, 0, 0, -0/sec (25) (d) (8 pts) In this part, suppose there is a malfunction on rotor 2, and it causes u = 0. Can you analyze the system controllability under all three conditions? (e) (7 pts) In this part, analyze the system controllability considering both rotors function prop- erly. Analyze the controllability for all three conditions. Can you compare the controllability in this part with the ones in part (d)?
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts