

Question: Problem 3 (6 points) Consider the following spatial mechanism (be sure to watch the video). You may assume that every joint is a revolute
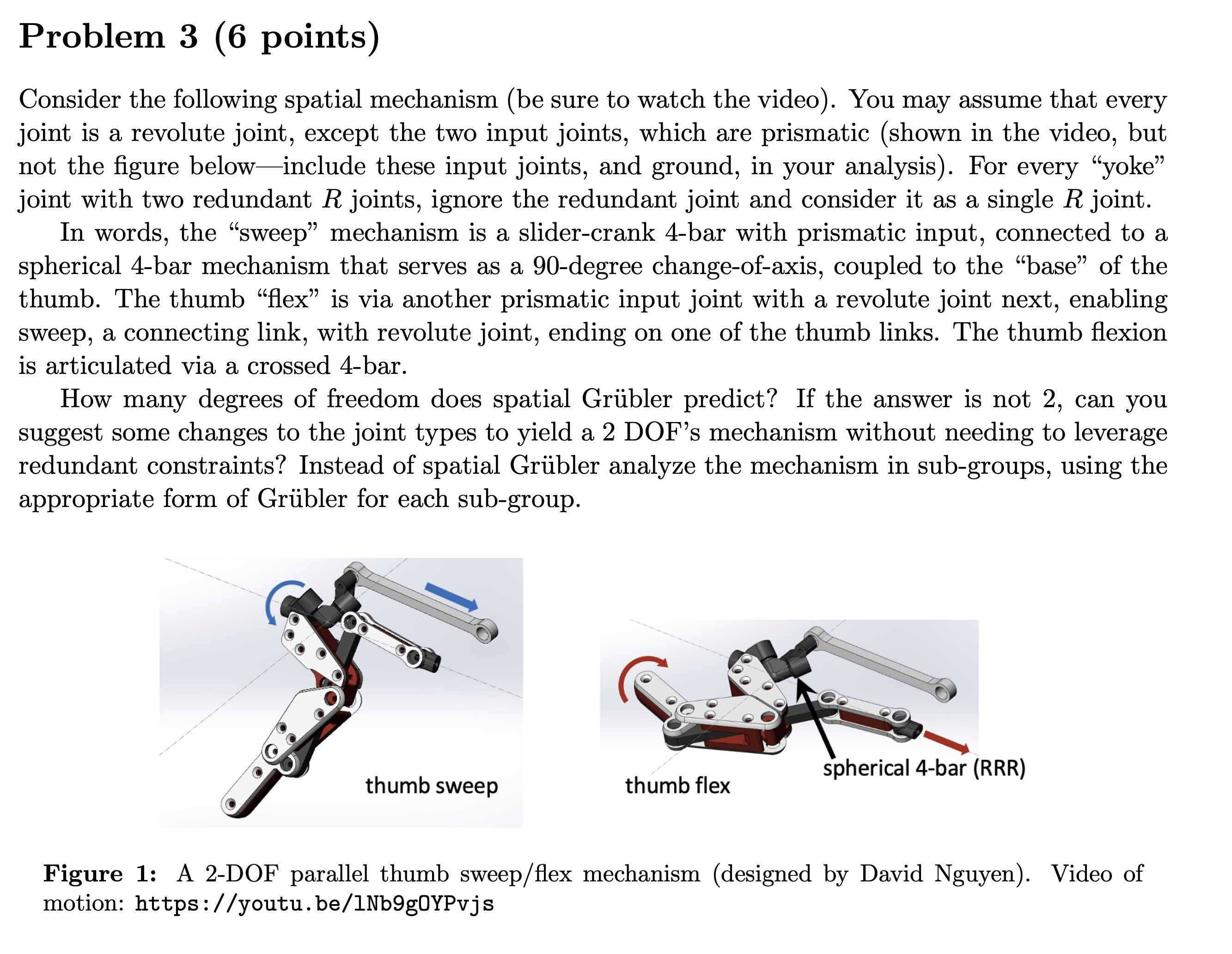
Problem 3 (6 points) Consider the following spatial mechanism (be sure to watch the video). You may assume that every joint is a revolute joint, except the two input joints, which are prismatic (shown in the video, but not the figure below-include these input joints, and ground, in your analysis). For every "yoke joint with two redundant R joints, ignore the redundant joint and consider it as a single R joint. In words, the sweep mechanism is a slider-crank 4-bar with prismatic input, connected to a spherical 4-bar mechanism that serves as a 90-degree change-of-axis, coupled to the base of the thumb. The thumb "flex" is via another prismatic input joint with a revolute joint next, enabling sweep, a connecting link, with revolute joint, ending on one of the thumb links. The thumb flexion is articulated via a crossed 4-bar. How many degrees of freedom does spatial Grbler predict? If the answer is not 2, can you suggest some changes to the joint types to yield a 2 DOF's mechanism without needing to leverage redundant constraints? Instead of spatial Grbler analyze the mechanism in sub-groups, using the appropriate form of Grbler for each sub-group. spherical 4-bar (RRR) thumb sweep thumb flex Figure 1: A 2-DOF parallel thumb sweep/flex mechanism (designed by David Nguyen). Video of motion: https://youtu.be/1Nb9g0YPvjs
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts