

Problem 4 (23 points). Motorized cart. Consider a pendulum of mass m and length 1 on...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
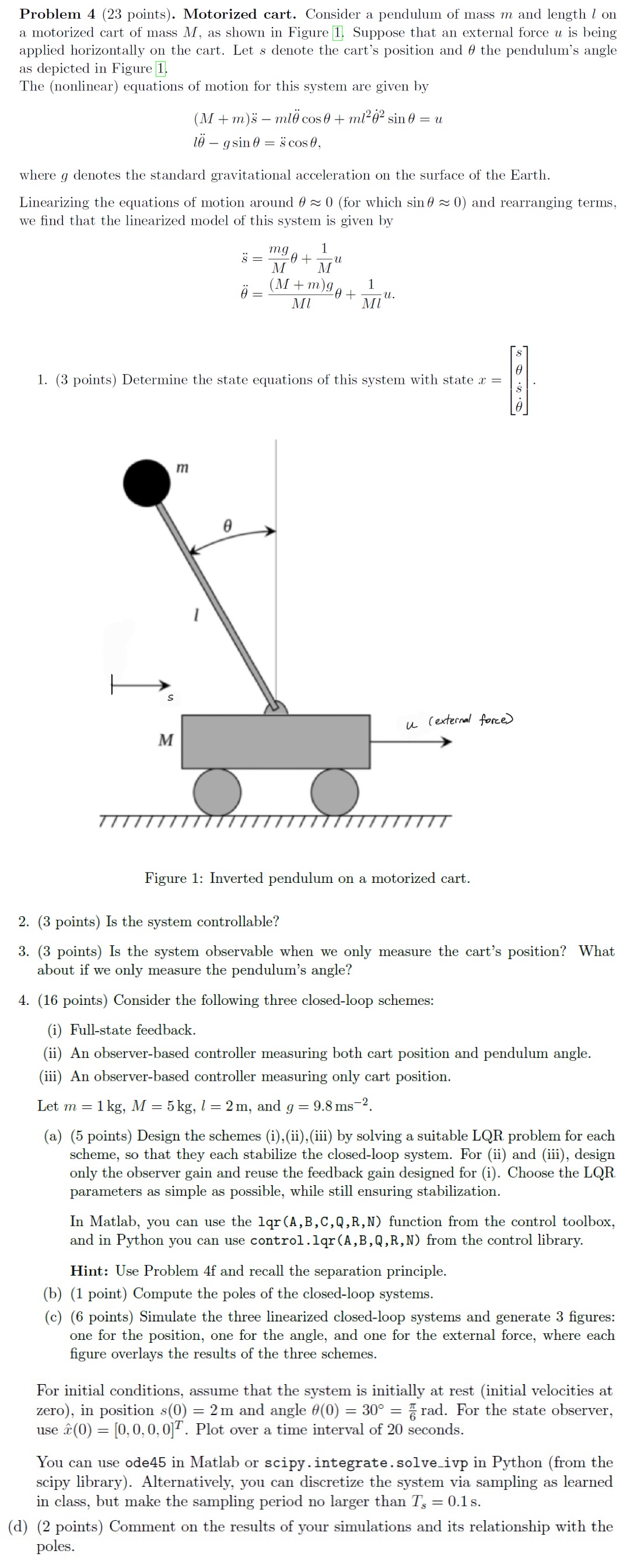
Problem 4 (23 points). Motorized cart. Consider a pendulum of mass m and length 1 on a motorized cart of mass M, as shown in Figure Suppose that an external force u is being applied horizontally on the cart. Let s denote the cart's position and the pendulum's angle as depicted in Figure 1. The (nonlinear) equations of motion for this system are given by where g denotes the standard gravitational acceleration on the surface of the Earth. Linearizing the equations of motion around 0 (for which sin 0) and rearranging terms, we find that the linearized model of this system is given by S (M +m)s - mle cos 0 + m 6 sin 0 = u 10 g sin = = $ cos 0, M m mg 1 -0 + U M M = (M + m)gg + MU S = 1. (3 points) Determine the state equations of this system with state x = 1 MU U. (external force) Figure 1: Inverted pendulum on a motorized cart. 2. (3 points) Is the system controllable? 3. (3 points) Is the system observable when we only measure the cart's position? What about if we only measure the pendulum's angle? 4. (16 points) Consider the following three closed-loop schemes: (i) Full-state feedback. (ii) An observer-based controller measuring both cart position and pendulum angle. (iii) An observer-based controller measuring only cart position. Let m= 1kg, M = 5 kg, l = 2m, and g = 9.8 ms-2. (a) (5 points) Design the schemes (i), (ii), (iii) by solving a suitable LQR problem for each scheme, so that they each stabilize the closed-loop system. For (ii) and (iii), design only the observer gain and reuse the feedback gain designed for (i). Choose the LQR parameters as simple as possible, while still ensuring stabilization. In Matlab, you can use the lqr (A,B,C,Q,R, N) function from the control toolbox, and in Python you can use control. lqr(A, B,Q,R,N) from the control library. Hint: Use Problem 4f and recall the separation principle. (b) (1 point) Compute the poles of the closed-loop systems. (c) (6 points) Simulate the three linearized closed-loop systems and generate 3 figures: one for the position, one for the angle, and one for the external force, where each figure overlays the results of the three schemes. For initial conditions, assume that the system is initially at rest (initial velocities at zero), in position s(0) = 2m and angle 0(0) = 30 rad. For the state observer, use (0) = [0, 0, 0, 0]T. Plot over a time interval of 20 seconds. You can use ode45 in Matlab or scipy.integrate. solve_ivp in Python (from the scipy library). Alternatively, you can discretize the system via sampling as learned in class, but make the sampling period no larger than T, = 0.1 s. (d) (2 points) Comment on the results of your simulations and its relationship with the poles. Problem 4 (23 points). Motorized cart. Consider a pendulum of mass m and length 1 on a motorized cart of mass M, as shown in Figure Suppose that an external force u is being applied horizontally on the cart. Let s denote the cart's position and the pendulum's angle as depicted in Figure 1. The (nonlinear) equations of motion for this system are given by where g denotes the standard gravitational acceleration on the surface of the Earth. Linearizing the equations of motion around 0 (for which sin 0) and rearranging terms, we find that the linearized model of this system is given by S (M +m)s - mle cos 0 + m 6 sin 0 = u 10 g sin = = $ cos 0, M m mg 1 -0 + U M M = (M + m)gg + MU S = 1. (3 points) Determine the state equations of this system with state x = 1 MU U. (external force) Figure 1: Inverted pendulum on a motorized cart. 2. (3 points) Is the system controllable? 3. (3 points) Is the system observable when we only measure the cart's position? What about if we only measure the pendulum's angle? 4. (16 points) Consider the following three closed-loop schemes: (i) Full-state feedback. (ii) An observer-based controller measuring both cart position and pendulum angle. (iii) An observer-based controller measuring only cart position. Let m= 1kg, M = 5 kg, l = 2m, and g = 9.8 ms-2. (a) (5 points) Design the schemes (i), (ii), (iii) by solving a suitable LQR problem for each scheme, so that they each stabilize the closed-loop system. For (ii) and (iii), design only the observer gain and reuse the feedback gain designed for (i). Choose the LQR parameters as simple as possible, while still ensuring stabilization. In Matlab, you can use the lqr (A,B,C,Q,R, N) function from the control toolbox, and in Python you can use control. lqr(A, B,Q,R,N) from the control library. Hint: Use Problem 4f and recall the separation principle. (b) (1 point) Compute the poles of the closed-loop systems. (c) (6 points) Simulate the three linearized closed-loop systems and generate 3 figures: one for the position, one for the angle, and one for the external force, where each figure overlays the results of the three schemes. For initial conditions, assume that the system is initially at rest (initial velocities at zero), in position s(0) = 2m and angle 0(0) = 30 rad. For the state observer, use (0) = [0, 0, 0, 0]T. Plot over a time interval of 20 seconds. You can use ode45 in Matlab or scipy.integrate. solve_ivp in Python (from the scipy library). Alternatively, you can discretize the system via sampling as learned in class, but make the sampling period no larger than T, = 0.1 s. (d) (2 points) Comment on the results of your simulations and its relationship with the poles.
Expert Answer:

Related Book For 

Posted Date:
Students also viewed these mechanical engineering questions
-
s1 educated (SSE) student for every three public school educated (PSE) students. Reasoning that students are not very dissimilar from threads, he suggests the following entry and exit routines be...
-
In any high-precision Foucault pendulum, it is important that the pendular restoring force be isotropic, since anisotropy will make the swinging period different in different planes and thereby cause...
-
What is food processing ? Different types of food processing methods Briefly explained
-
Explain what is meant by each of the following: (a) Freedom from error (b) Neutrality; (c) Completeness;
-
Pettit Printing Company has a total market value of $100 million, consisting of 1 million shares selling for $50 per share and $50 million of 10% perpetual bonds now selling at par. The companys EBIT...
-
We see that 75 of the 264 people in the study allowed the pressure to reach its maximum level of \(300 \mathrm{mmHg}\), without ever saying that the pain was too much (MaxPressure=yes). Use this...
-
On June 1, Noonan Inc. issues 4,000 shares of no-par common stock at a cash price of $6 per share. Journalize the issuance of the shares assuming the stock has a stated value of $1 per share.
-
1 . Discuss the accounting requirements for stock compensation plans under GAAP ( ASC 7 1 8 ) . 2 . Discuss the valuation techniques / models used to estimate the fair value for employee share...
-
Jack C. Schoenholtz was a shareholder and member of the board of directors of Rye Psychiatric Hospital Center, Inc. (Rye Hospital). Four years after the hospital was incorporated, a split had...
-
Maury, age 30, has come to you for advice regarding college planning for his two-year-old son, Brandon. He has presented you with the following information: Current annual salary: $96,700 Traditional...
-
What gross proceeds (before any commissions on the trade) would an investor receive if she sold a $10,000 face value T-bill that matures October 12, 2017?? $9.955.50? $9,050.00? $9.961.50? $5.550.42...
-
20. Conflicts of interest between stockholders and bondholders are known as: 1. dealer costs. 2. trustee costs. 3. agency costs. 4. underwriting costs. 5. financial distress costs. 21. MM's...
-
You will be provided a car price of either: $12k, $16k, $20k, $24k, $28k, $32k, $36k, $40k, $44k, or $48k 1. Suppose you have $4000 saved up for a down payment, and you plan to finance the rest of...
-
The Philadelphia Phillies occasionally offer "Dollar Dog Nights" as a way to promote attendance at ballgames (baseball games routinely do not sell out). Suppose they sell hot dogs for $1 each and...
-
Four years ago, Thomas bought an industrial-grade snowblower and started a business clearing sidewalks for churches, parks, and for the city government. Because of increasing maintenance costs for...
-
You will be writing a mini-business plan and have to think through all the different areas of how you would run your business. Be as realistic as possible and choose something you'll enjoy writing...
-
The manager of a local convenience store is expanding his line of small toy items. To price these new items, the manager is looking at the prices being charged by competing retailers in his area. For...
-
Consider a unity feedback system with the loop transfer function (a) For K = 4, show that the gain margin is 3.5 dB. (b) If we wish to achieve a gain margin equal to 16 dB, determine the value of the...
-
Consider the closed-loop transfer function Develop an m-file to, obtain the Bode plot and verify that the resonant frequency is 5 rad/s and that the peak magnitude M pÏ is 14 dB. 25 r(s) = s, s...
-
A fighter aircraft has the transfer function Where is the pitch rate (rad/s) and 5 is the elevator deflection (rad). The four poles represent the phugoid and short-period modes. The phugoid mode has...
-
Mosca and Vespa are two sole traders with the financial statements (in euros) for the year ending 31 December as set out in Figure 7.10. Using the information contained in the financial statements,...
-
The following information has been extracted from the recently published statements of company D, as set out in Figure 7.11. Figure 7.11 Financial statements for company D as at 30 April The ratios...
-
Which of the following costs related to a building is NOT usually treated as an expense but is added to the asset? A. Repairs. B. Redecoration. C. Fitting new safety equipment. D. Cleaning.

Study smarter with the SolutionInn App