

Question: Problem 4 . Below shows a 6 - DOF robot. The robot's wrist, called as the spherical wrist, is made such that the axes of
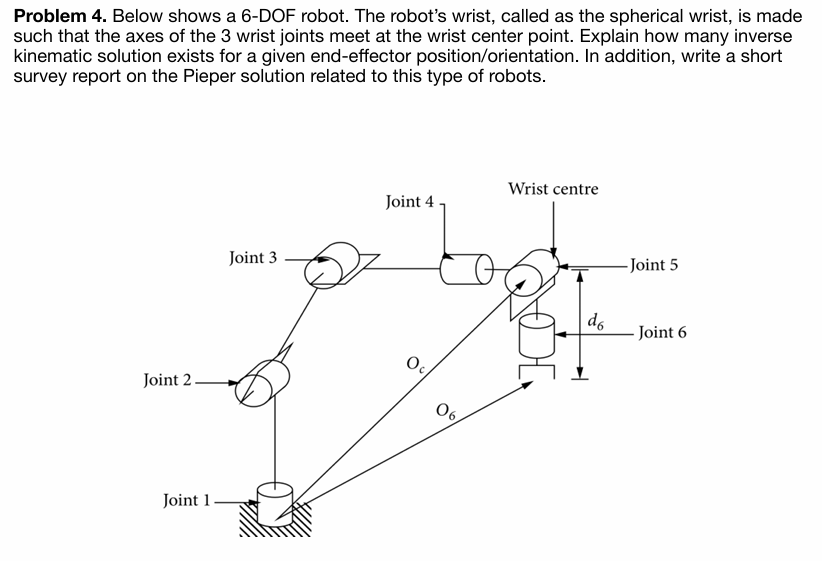
Problem Below shows a DOF robot. The robot's wrist, called as the spherical wrist, is made such that the axes of the wrist joints meet at the wrist center point. Explain how many inverse kinematic solution exists for a given endeffector positionorientation In addition, write a short survey report on the Pieper solution related to this type of robots.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock