

Question: Problem 4 Let R1 : R3 > R3, R2 : R3 > R3 be two 3D canonical rotations and R3 : R2 R2, RA :
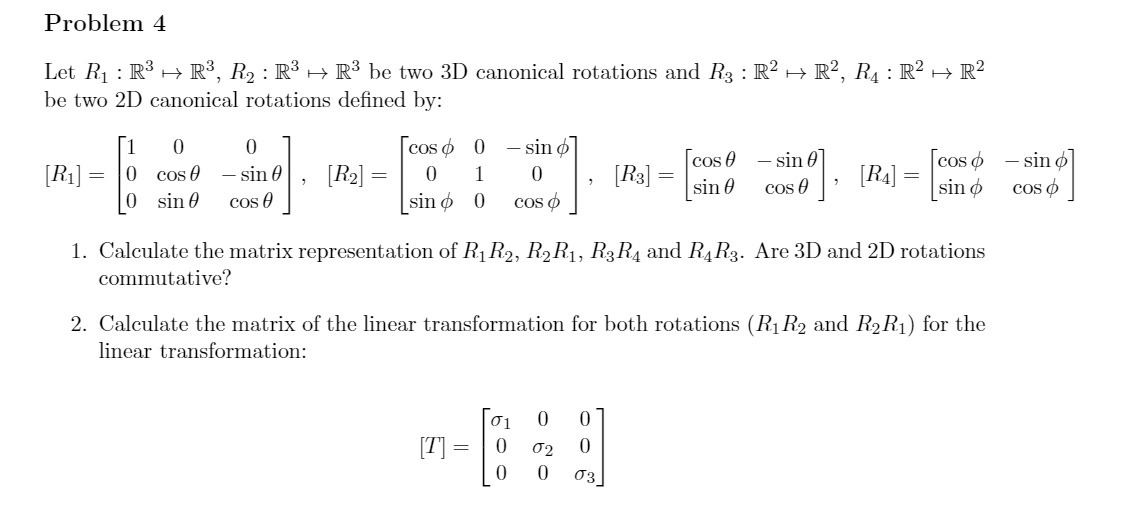
Problem 4 Let R1 : R3 > R3, R2 : R3 > R3 be two 3D canonical rotations and R3 : R2 R2, RA : R? > R be two 2D canonical rotations defined by: 0 0 coso 0 - sino [Ri] = cos 0 - sin 0 [R2] = 0 1 0 [R3] = cos 0 - sin 0 , [RA] = cos o - sin o sin 0 cos 0 sing 0 coso sin 0 cos sin 6 cos O 1. Calculate the matrix representation of R1 R2, R2 R1, R3 R4 and RAR3. Are 3D and 2D rotations commutative? 2. Calculate the matrix of the linear transformation for both rotations (R1 R2 and R2R1) for the linear transformation: 01 0 [T] = 0 02 0 O 03
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock