

Question: PROBLEM 4 ROBOT NAVIGATION - NOVEL IMPLEMENTATION OF DRIVE ALGORITHM For this problem, we will be developing the initial drive algorithm Boolean equation for our
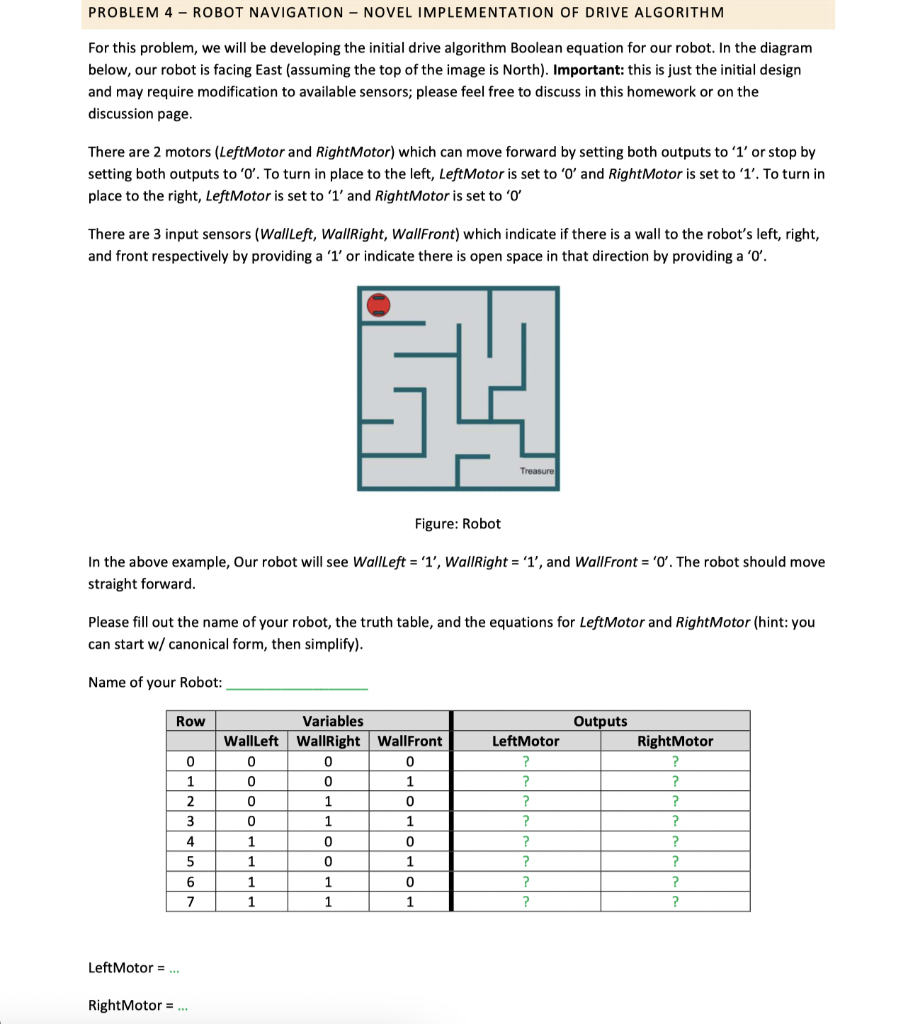
PROBLEM 4 ROBOT NAVIGATION - NOVEL IMPLEMENTATION OF DRIVE ALGORITHM For this problem, we will be developing the initial drive algorithm Boolean equation for our robot. In the diagram below, our robot is facing East (assuming the top of the image is North). Important: this is just the initial design and may require modification to available sensors; please feel free to discuss in this homework or on the discussion page. There are 2 motors (LeftMotor and RightMotor) which can move forward by setting both outputs to '1' or stop by setting both outputs to 'O'. To turn in place to the left, LeftMotor is set to 'O' and Right Motor is set to '1'. To turn in place to the right, LeftMotor is set to 'l' and RightMotor is set to 'O There are 3 input sensors (WallLeft, WallRight, WallFront) which indicate there is a wall to the robot's left, right, and front respectively by providing a '1' or indicate there is open space in that direction by providing a 'o'. Treasure Figure: Robot In the above example, Our robot will see WallLeft = '1', WallRight = '1', and WallFront = 'O'. The robot should move straight forward. Please fill out the name of your robot, the truth table, and the equations for LeftMotor and RightMotor (hint: you can start w/ canonical form, then simplify). Name of your Robot: Row Outputs LeftMotor ? 0 1 2 Variables WallLeft WallRight Wall Front 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 3 RightMotor ? ? ? ? ? ? ? ? ? ? ? ? ? 4 5 6 7 ? Left Motor = ... Right Motor =
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts