

Question: Problem 5 . Consider the segway from Homework 4 . We seek to design the following controller to stabilize the segway upright while driving with
Problem Consider the segway from Homework
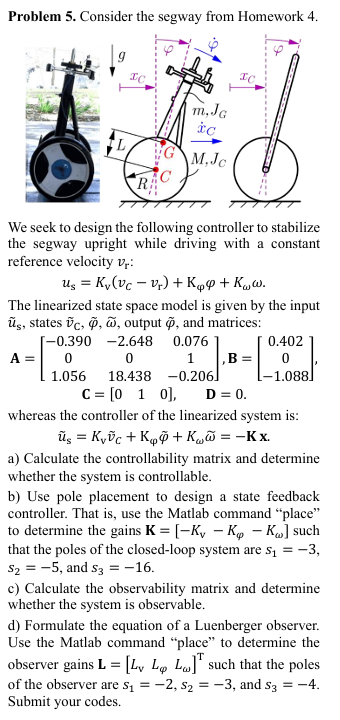
We seek to design the following controller to stabilize
the segway upright while driving with a constant
reference velocity vr :
usKvvCvrKphi phi Komega omega
The linearized state space model is given by the input
tildeus states tildevCtildephi widetildeomega output tildephi and matrices:
A
B
CD
whereas the controller of the linearized system is:
tildeusKvtildevCKphi tildephi Komega widetildeomega Kx
aKKvKphi Komega such
that the poles of the closedloop system are s
s and s
cLLvLphi Lomega T such that the poles
of the observer are ss and s
Submit your codes.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock