

Question: Problem statement Given the below maze configuration, the task of the robot is to navigate in the maze and find the optimal path to reach
Problem statement
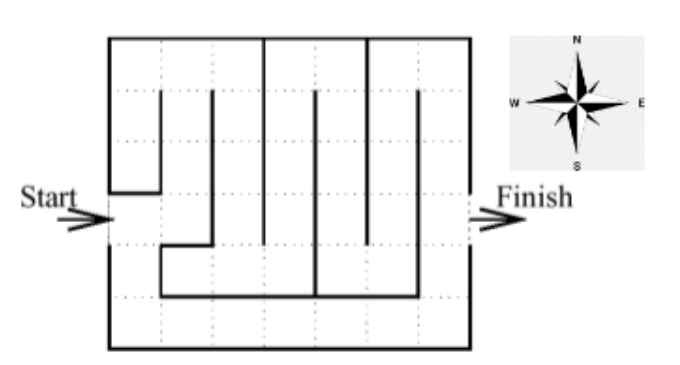
Given the below maze configuration, the task of the robot is to navigate in the maze and find the optimal path to reach the finish position. It can move to the north, south, west and east direction. While navigating through the environment it has obstacles like walls. For each transition, a path cost of +3 is added in search. Assume that the robots vision sensors are sensitive to the exposure to the sunlight and whenever it tries to move towards the east direction resulting in incurring an additional penalty of +5 cost. Use Euclidean distance as a heuristic wherever necessary.
Use the following algorithms to find the optimal path.
a. A* Algorithm
b. Hill Climbing Algorithm
Evaluations will be based on the following:
1. Explain the PEAS (Performance measure, Environment, Actuator, Sensor.) for your agent. (20% marks)
2. Use both the above mentioned algorithms and implement in PYTHON. (20% + 20% = 40% marks)
3. Print the optimal path sequence with costs. (20% marks)
4. Include code in your implementation to calculate the space complexity and time complexity for the informed search and print the same. For local search interpret the significance of the hyperparameters if any applicable . (20% marks)
Finish
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts