

Question: Program mbot (mcore) Robot using mblock 3.4.11 (version) I am required to make the robot this: Create a piece of code that makes the robot
Program mbot (mcore) Robot using mblock 3.4.11 (version) I am required to make the robot this: "Create a piece of code that makes the robot drive straight until it gets within 10 cm of an object then stop until that object moves again." I need a screen shot how to plug those codes please and we are using "Arduino mode" since I am unable to make it work and it only makes a horrible sound. This is what I attempted and failed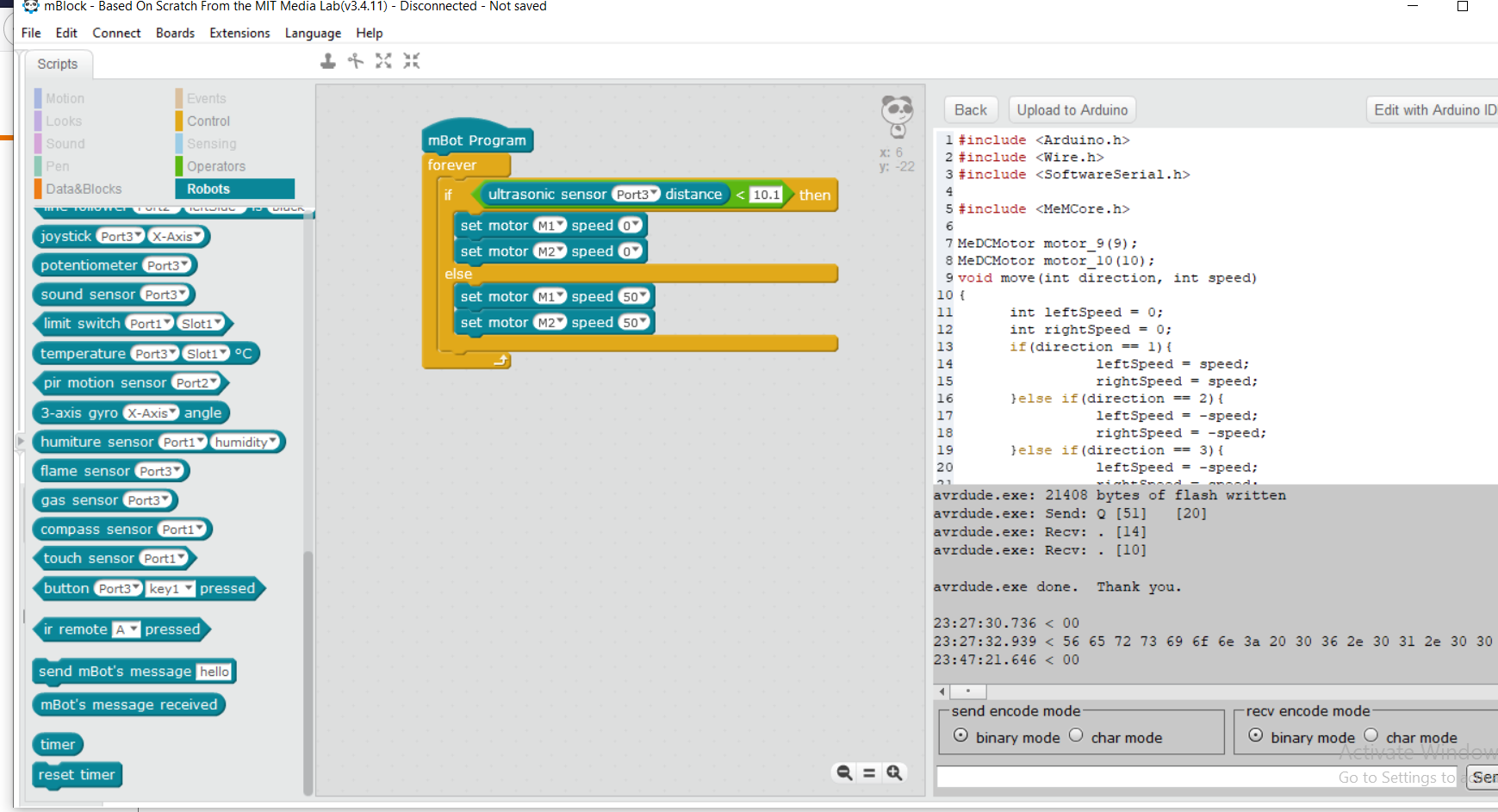
mBlock - Based On Scratch From the MIT Media Lab(v3.4.11) - Disconnected - Not saved File Edit Connect Boards Extensions Language Help Scripts * * Back Upload to Arduino Edit with Arduino ID mBot Program Motion Events Looks Control Sound Sensing Pen Operators Data&Blocks Robots TITTO TUTTO MOUILLILILUTULT i #include
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts