

Question: Project Overview We have studied the simple pendulum problem in some detail already in this class, and this exercise will hopefully add some additional insight
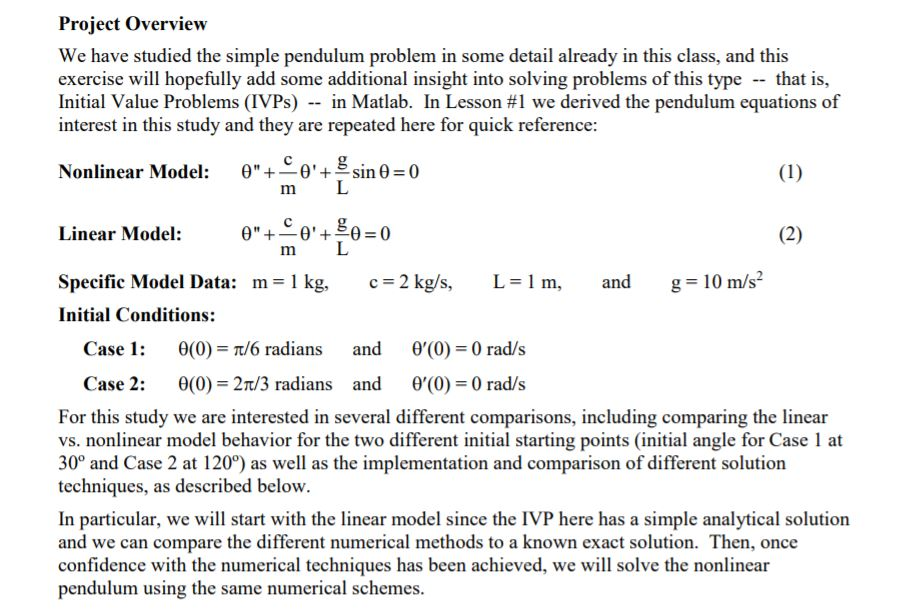
Project Overview We have studied the simple pendulum problem in some detail already in this class, and this exercise will hopefully add some additional insight into solving problems of this type - - that is, Initial Value Problems (IVPs) -- in Matlab. In Lesson #1 we derived the pendulum equations of interest in this study and they are repeated here for quick reference Nonlinear Model: "+0'+ sin 0 Linear Model: m=1kg, c-2kg/s, L=lm, and g=10 m/s- Specific Model Data: Initial Conditions: (0)=/6 radians (0) '(0)=0 rad/s '(0) = 0 rad/s Case 1: and Case 2: 2t/3 radians and For this study we are interested in several different comparisons, including comparing the linear vs. nonlinear model behavior for the two different initial starting points (initial angle for Case 1 at 30 and Case 2 at 120) as well as the implementation and comparison of different solution techniques, as described below. In particular, we will start with the linear model since the IVP here has a simple analytical solution and we can compare the different numerical methods to a known exact solution. Then, once confidence with the numerical techniques has been achieved, we will solve the nonlinear pendulum using the same numerical schemes. Project Overview We have studied the simple pendulum problem in some detail already in this class, and this exercise will hopefully add some additional insight into solving problems of this type - - that is, Initial Value Problems (IVPs) -- in Matlab. In Lesson #1 we derived the pendulum equations of interest in this study and they are repeated here for quick reference Nonlinear Model: "+0'+ sin 0 Linear Model: m=1kg, c-2kg/s, L=lm, and g=10 m/s- Specific Model Data: Initial Conditions: (0)=/6 radians (0) '(0)=0 rad/s '(0) = 0 rad/s Case 1: and Case 2: 2t/3 radians and For this study we are interested in several different comparisons, including comparing the linear vs. nonlinear model behavior for the two different initial starting points (initial angle for Case 1 at 30 and Case 2 at 120) as well as the implementation and comparison of different solution techniques, as described below. In particular, we will start with the linear model since the IVP here has a simple analytical solution and we can compare the different numerical methods to a known exact solution. Then, once confidence with the numerical techniques has been achieved, we will solve the nonlinear pendulum using the same numerical schemes
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts