

Question: Provide detailed instructions along with numerical example on how to find the forward kinematics of a three wheeled robot with differential drive mechanism Donot use
Provide detailed instructions along
with numerical example on how to find the forward kinematics of a three wheeled robot with differential drive mechanism
Donot use matrix system use the eqaution
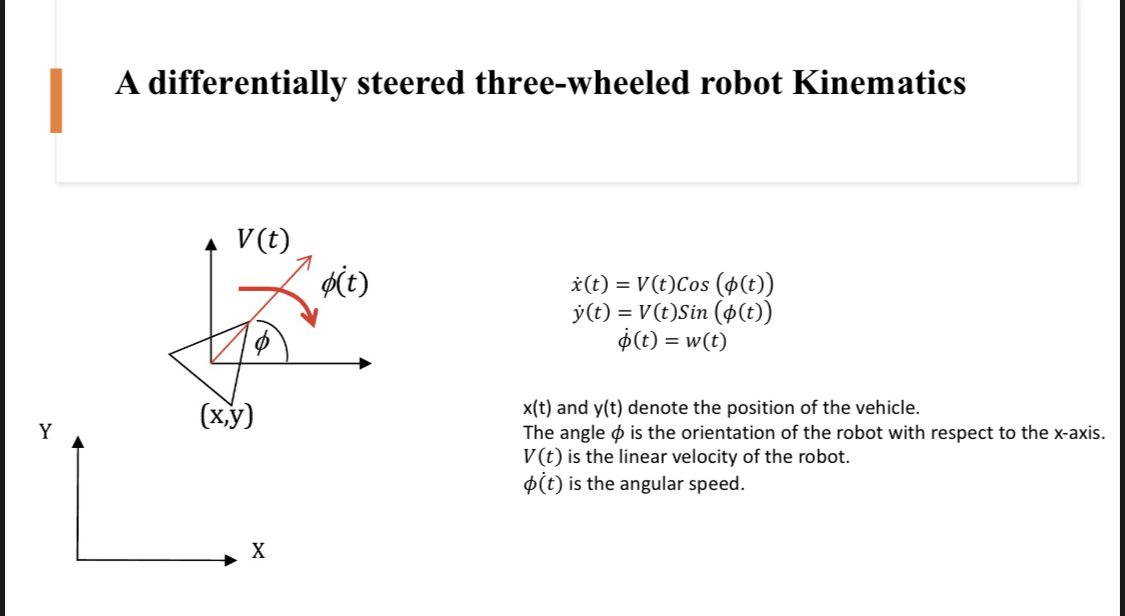
A differentially steered threewheeled robot Kinematics
and denote the position of the vehicle.
The angle is the orientation of the robot with respect to the axis. is the linear velocity of the robot.
is the angular speed.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock