

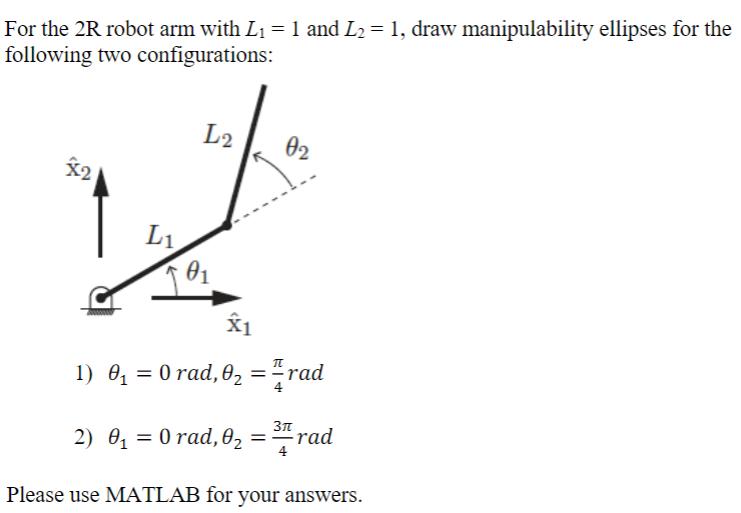
For the 2R robot arm with L = 1 and L = 1, draw manipulability ellipses...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:
robot rigidBody Tree Data Format column MaxNumBodies3 L1 03 L2 03 body rigidBody link1 joint rigidBo... View the full answer

Related Book For 
Management Leading and Collaborating in a Competitive World
ISBN: 978-1259546945
12th edition
Authors: Thomas Bateman, Scott Snell
Posted Date:
