

Question: Q 2 ( a ) The frames describing the base of a robot and an object are respectively given relative to the universe frame as
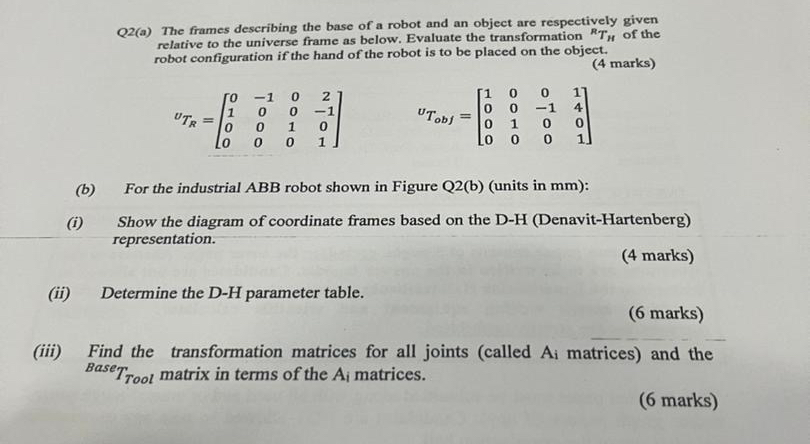
Qa The frames describing the base of a robot and an object are respectively given relative to the universe frame as below. Evaluate the transformation of the robot configuration if the hand of the robot is to be placed on the object.
marks
b For the industrial ABB robot shown in Figure Qbunits in mm:
i Show the diagram of coordinate frames based on the DH DenavitHartenberg representation.
marks
ii Determine the D H parameter table.
marks
iii Find the transformation matrices for all joints called matrices and the matrix in terms of the matrices.
marks
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock