

Question: Q 4 . Consider a simplified model for a human leg mechanism shown in Fig . 1 ( a ) . The model assumes an
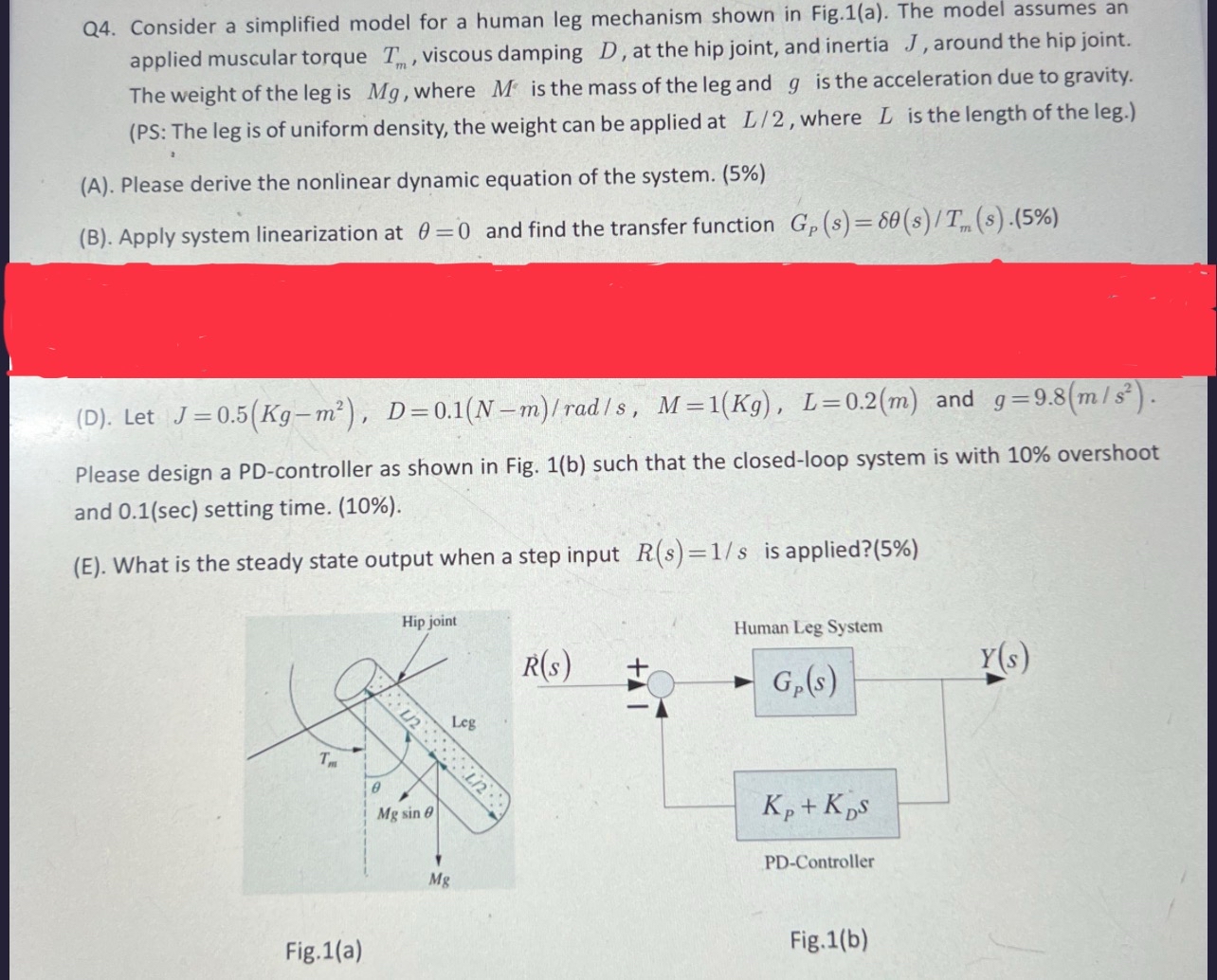
Q Consider a simplified model for a human leg mechanism shown in Figa The model assumes an applied muscular torque viscous damping at the hip joint, and inertia around the hip joint. The weight of the leg is where is the mass of the leg and is the acceleration due to gravity. PS: The leg is of uniform density, the weight can be applied at where is the length of the leg.
A Please derive the nonlinear dynamic equation of the system.
B Apply system linearization at and find the transfer function
D Let and
Please design a PDcontroller as shown in Fig. b such that the closedloop system is with overshoot and sec setting time.
E What is the steady state output when a step input is applied?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock