

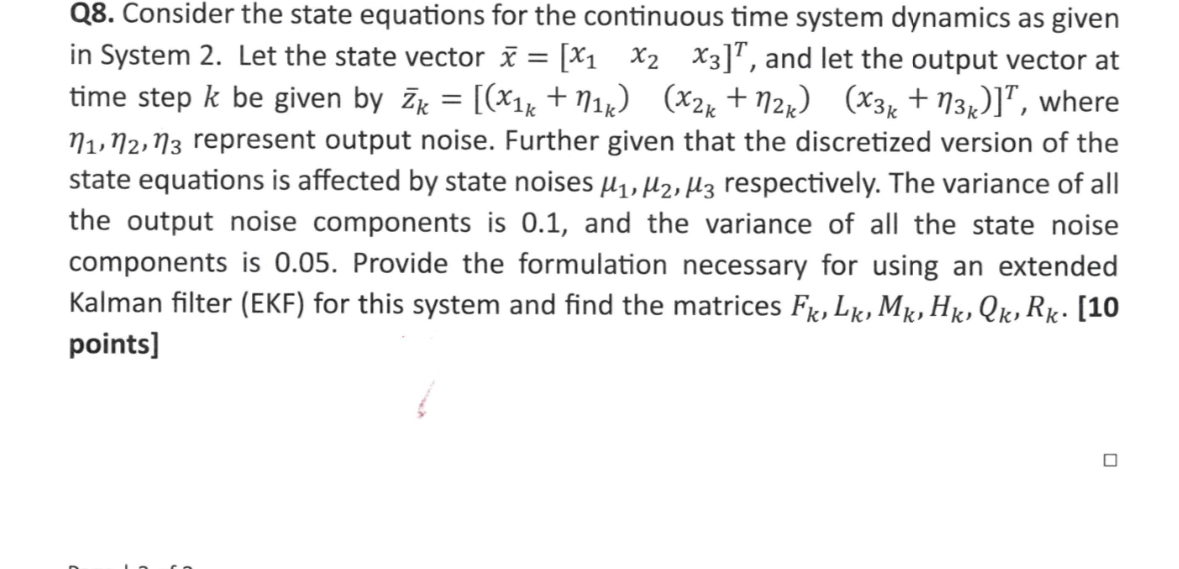
Question: Q 8 . Consider the state equations for the continuous time system dynamics as given in System 2 . Let the state vector x =
Q Consider the state equations for the continuous time system dynamics as given in System Let the state vector and let the output vector at time step be given by where represent output noise. Further given that the discretized version of the state equations is affected by state noises respectively. The variance of all the output noise components is and the variance of all the state noise components is Provide the formulation necessary for using an extended Kalman filter EKF for this system and find the matrices points
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock