

Q-01) For the robot shown in the figure below, Calculate degrees of freedom. 1 mark Assign...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
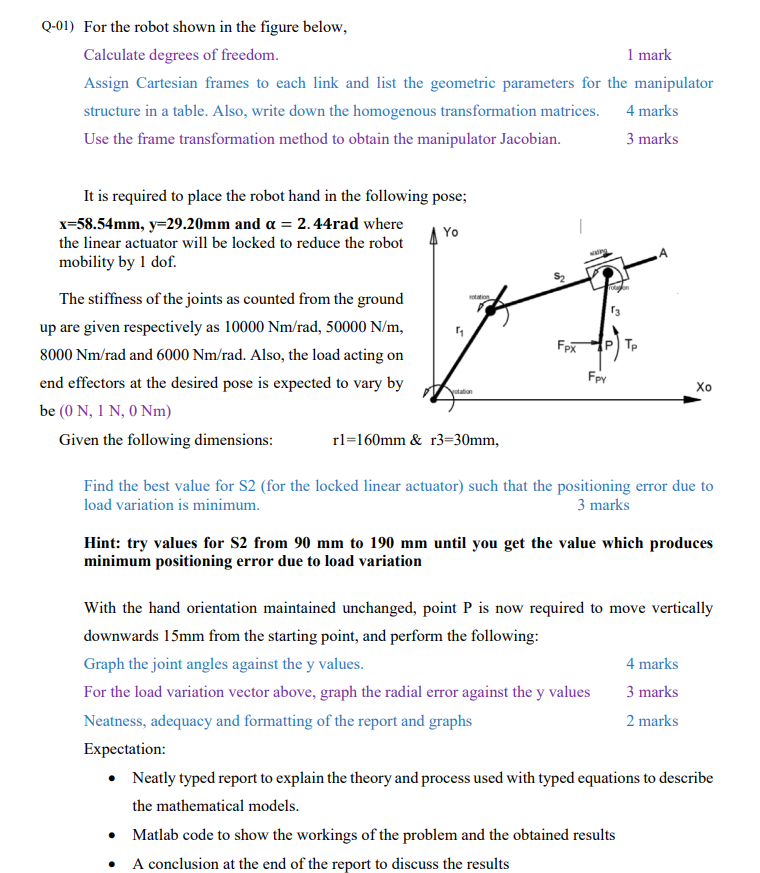
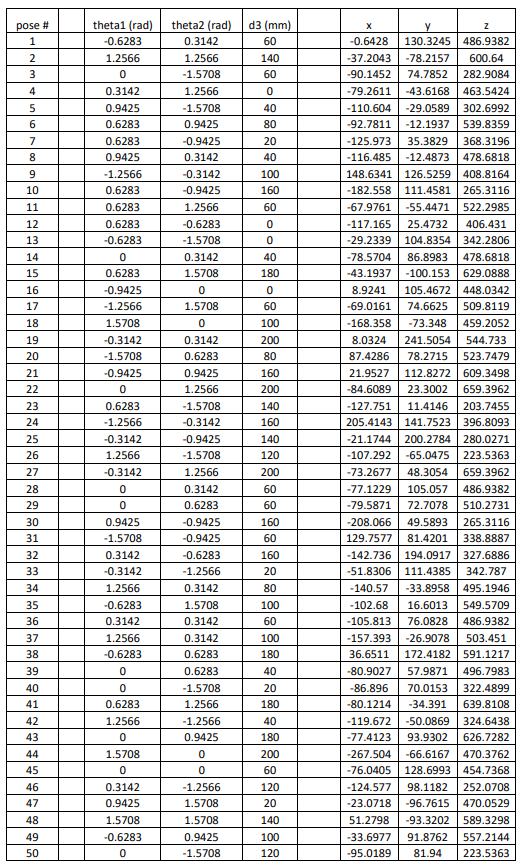
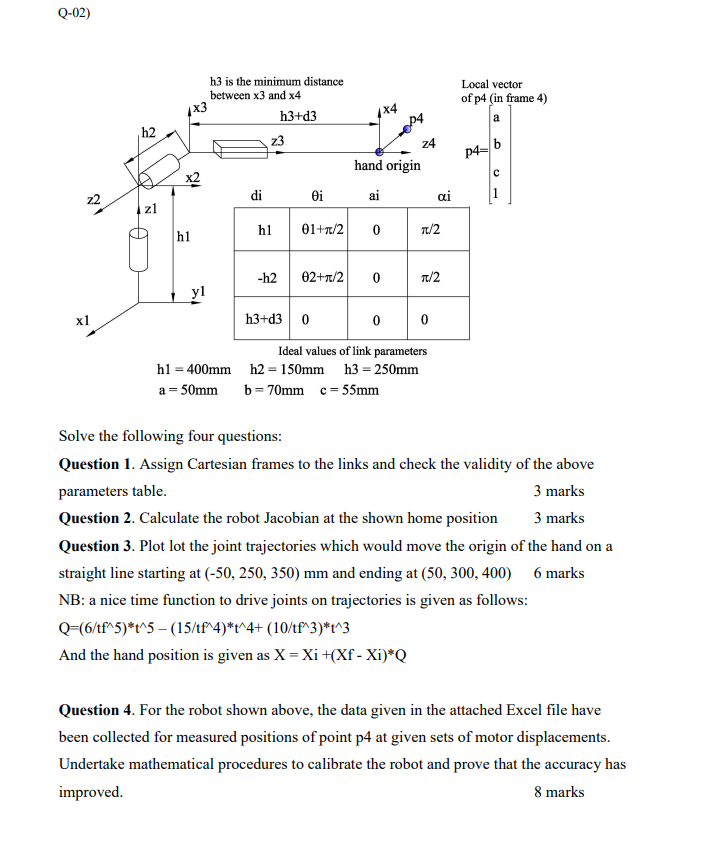
Q-01) For the robot shown in the figure below, Calculate degrees of freedom. 1 mark Assign Cartesian frames to each link and list the geometric parameters for the manipulator structure in a table. Also, write down the homogenous transformation matrices. 4 marks Use the frame transformation method to obtain the manipulator Jacobian. 3 marks It is required to place the robot hand in the following pose; x=58.54mm, y=29.20mm and a = 2.44rad where the linear actuator will be locked to reduce the robot mobility by 1 dof. The stiffness of the joints as counted from the ground up are given respectively as 10000 Nm/rad, 50000 N/m, 8000 Nm/rad and 6000 Nm/rad. Also, the load acting on end effectors at the desired pose is expected to vary by be (0 N, 1 N, 0 Nm) Given the following dimensions: Yo "1 rotation otation r1=160mm & r3=30mm, 1 weing 13 Fpx P Tp FpY Find the best value for S2 (for the locked linear actuator) such that the positioning error due to load variation is minimum. 3 marks Hint: try values for S2 from 90 mm to 190 mm until you get the value which produces minimum positioning error due to load variation Xo With the hand orientation maintained unchanged, point P is now required to move vertically downwards 15mm from the starting point, and perform the following: Graph the joint angles against the y values. For the load variation vector above, graph the radial error against the y values Neatness, adequacy and formatting of the report and graphs Expectation: 4 marks 3 marks 2 marks Neatly typed report to explain the theory and process used with typed equations to describe the mathematical models. Matlab code to show the workings of the problem and the obtained results A conclusion at the end of the report to discuss the results pose # 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 thetal (rad) -0.6283 1.2566 0 0.3142 0.9425 0.6283 0.6283 0.9425 -1.2566 0.6283 0.6283 0.6283 -0.6283 0 0.6283 -0.9425 -1.2566 1.5708 -0.3142 -1.5708 -0.9425 0 0.6283 -1.2566 -0.3142 1.2566 -0.3142 0 0 0.9425 -1.5708 0.3142 -0.3142 1.2566 -0.6283 0.3142 1.2566 -0.6283 0 0 0.6283 1.2566 0 1.5708 0 0.3142 0.9425 1.5708 -0.6283 0 theta2 (rad) 0.3142 1.2566 -1.5708 1.2566 -1.5708 0.9425 -0.9425 0.3142 -0.3142 -0.9425 1.2566 -0.6283 -1.5708 0.3142 1.5708 0 1.5708 0 0.3142 0.6283 0.9425 1.2566 -1.5708 -0.3142 -0.9425 -1.5708 1.2566 0.3142 0.6283 -0.9425 -0.9425 -0.6283 -1.2566 0.3142 1.5708 0.3142 0.3142 0.6283 0.6283 -1.5708 1.2566 -1.2566 0.9425 0 0 -1.2566 1.5708 1.5708 0.9425 -1.5708 d3 (mm) 60 140 60 0 40 80 20 40 100 160 60 0 0 40 180 0 60 100 200 80 160 200 140 160 140 120 200 60 60 160 60 160 20 80 100 60 100 180 40 20 180 40 180 200 60 120 20 140 100 120 X Y Z -0.6428 130.3245 486.9382 -37.2043 -78.2157 600.64 -90.1452 74.7852 282.9084 -79.2611 -43.6168 463.5424 -110.604 -29.0589 302.6992 -92.7811 -12.1937 539.8359 -125.973 35.3829 368.3196 -116.485 -12.4873 478.6818 148.6341 126.5259 408.8164 -182.558 111.4581 265.3116 -67.9761 -55.4471 522.2985 -117.165 25.4732 406.431 -29.2339 104.8354 342.2806 -78.5704 86.8983 478.6818 -43.1937 -100.153 629.0888 8.9241 105.4672 448.0342 -69.0161 74.6625 509.8119 -168.358 -73.348 459.2052 544.733 523.7479 8.0324 241.5054 87.4286 78.2715 21.9527 112.8272 609.3498 -84.6089 23.3002 659.3962 -127.751 11.4146 203.7455 205.4143 141.7523 396.8093 -21.1744 200.2784 280.0271 -107.292 -65.0475 223.5363 -73.2677 48.3054 659.3962 -77.1229 105.057 486.9382 -79.5871 72.7078 510.2731 -208.066 49.5893 265.3116 129.7577 81.4201 338.8887 -142.736 194.0917 327.6886 -51.8306 111.4385 342.787 -140.57 -33.8958 495.1946 -102.68 16.6013 549.5709 -105.813 76.0828 486.9382 -157.393 -26.9078 503.451 36.6511 172.4182 591.1217 -80.9027 57.9871 496.7983 -86.896 70.0153 322.4899 -80.1214 -34.391 639.8108 -119.672 -50.0869 324.6438 -77.4123 93.9302 626.7282 -267.504 -66.6167 470.3762 -76.0405 128.6993 454.7368 -124.577 98.1182 252.0708 -23.0718 -96.7615 470.0529 51.2798 -93.3202 589.3298 557.2144 -33.6977 91.8762 -95.0189 81.94 223.5363 Q-02) z2 x1 h2 zl 1x3 13 hl yl h3 is the minimum distance between x3 and x4 h3+d3 hl=400mm a = 50mm di z3 h1 -h2 Oi 01+/2 02+/2 h3+d30 hand origin ai 0 0 24 0 0 Ideal values of link parameters h2=150mm h3 = 250mm b=70mm c=55mm Q=(6/tf^5)*t^5 - (15/tf^4)*t^4+ (10/tf^3)*t^3 And the hand position is given as X = Xi +(Xf - Xi)*Q ai TT/2 TT/2 Local vector of p4 (in frame 4) a p4= Solve the following four questions: Question 1. Assign Cartesian frames to the links and check the validity of the above parameters table. 3 marks 3 marks Question 2. Calculate the robot Jacobian at the shown home position Question 3. Plot lot the joint trajectories which would move the origin of the hand on a straight line starting at (-50, 250, 350) mm and ending at (50, 300, 400) 6 marks NB: a nice time function to drive joints on trajectories is given as follows: Question 4. For the robot shown above, the data given in the attached Excel file have been collected for measured positions of point p4 at given sets of motor displacements. Undertake mathematical procedures to calibrate the robot and prove that the accuracy has improved. 8 marks Q-01) For the robot shown in the figure below, Calculate degrees of freedom. 1 mark Assign Cartesian frames to each link and list the geometric parameters for the manipulator structure in a table. Also, write down the homogenous transformation matrices. 4 marks Use the frame transformation method to obtain the manipulator Jacobian. 3 marks It is required to place the robot hand in the following pose; x=58.54mm, y=29.20mm and a = 2.44rad where the linear actuator will be locked to reduce the robot mobility by 1 dof. The stiffness of the joints as counted from the ground up are given respectively as 10000 Nm/rad, 50000 N/m, 8000 Nm/rad and 6000 Nm/rad. Also, the load acting on end effectors at the desired pose is expected to vary by be (0 N, 1 N, 0 Nm) Given the following dimensions: Yo "1 rotation otation r1=160mm & r3=30mm, 1 weing 13 Fpx P Tp FpY Find the best value for S2 (for the locked linear actuator) such that the positioning error due to load variation is minimum. 3 marks Hint: try values for S2 from 90 mm to 190 mm until you get the value which produces minimum positioning error due to load variation Xo With the hand orientation maintained unchanged, point P is now required to move vertically downwards 15mm from the starting point, and perform the following: Graph the joint angles against the y values. For the load variation vector above, graph the radial error against the y values Neatness, adequacy and formatting of the report and graphs Expectation: 4 marks 3 marks 2 marks Neatly typed report to explain the theory and process used with typed equations to describe the mathematical models. Matlab code to show the workings of the problem and the obtained results A conclusion at the end of the report to discuss the results pose # 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 thetal (rad) -0.6283 1.2566 0 0.3142 0.9425 0.6283 0.6283 0.9425 -1.2566 0.6283 0.6283 0.6283 -0.6283 0 0.6283 -0.9425 -1.2566 1.5708 -0.3142 -1.5708 -0.9425 0 0.6283 -1.2566 -0.3142 1.2566 -0.3142 0 0 0.9425 -1.5708 0.3142 -0.3142 1.2566 -0.6283 0.3142 1.2566 -0.6283 0 0 0.6283 1.2566 0 1.5708 0 0.3142 0.9425 1.5708 -0.6283 0 theta2 (rad) 0.3142 1.2566 -1.5708 1.2566 -1.5708 0.9425 -0.9425 0.3142 -0.3142 -0.9425 1.2566 -0.6283 -1.5708 0.3142 1.5708 0 1.5708 0 0.3142 0.6283 0.9425 1.2566 -1.5708 -0.3142 -0.9425 -1.5708 1.2566 0.3142 0.6283 -0.9425 -0.9425 -0.6283 -1.2566 0.3142 1.5708 0.3142 0.3142 0.6283 0.6283 -1.5708 1.2566 -1.2566 0.9425 0 0 -1.2566 1.5708 1.5708 0.9425 -1.5708 d3 (mm) 60 140 60 0 40 80 20 40 100 160 60 0 0 40 180 0 60 100 200 80 160 200 140 160 140 120 200 60 60 160 60 160 20 80 100 60 100 180 40 20 180 40 180 200 60 120 20 140 100 120 X Y Z -0.6428 130.3245 486.9382 -37.2043 -78.2157 600.64 -90.1452 74.7852 282.9084 -79.2611 -43.6168 463.5424 -110.604 -29.0589 302.6992 -92.7811 -12.1937 539.8359 -125.973 35.3829 368.3196 -116.485 -12.4873 478.6818 148.6341 126.5259 408.8164 -182.558 111.4581 265.3116 -67.9761 -55.4471 522.2985 -117.165 25.4732 406.431 -29.2339 104.8354 342.2806 -78.5704 86.8983 478.6818 -43.1937 -100.153 629.0888 8.9241 105.4672 448.0342 -69.0161 74.6625 509.8119 -168.358 -73.348 459.2052 544.733 523.7479 8.0324 241.5054 87.4286 78.2715 21.9527 112.8272 609.3498 -84.6089 23.3002 659.3962 -127.751 11.4146 203.7455 205.4143 141.7523 396.8093 -21.1744 200.2784 280.0271 -107.292 -65.0475 223.5363 -73.2677 48.3054 659.3962 -77.1229 105.057 486.9382 -79.5871 72.7078 510.2731 -208.066 49.5893 265.3116 129.7577 81.4201 338.8887 -142.736 194.0917 327.6886 -51.8306 111.4385 342.787 -140.57 -33.8958 495.1946 -102.68 16.6013 549.5709 -105.813 76.0828 486.9382 -157.393 -26.9078 503.451 36.6511 172.4182 591.1217 -80.9027 57.9871 496.7983 -86.896 70.0153 322.4899 -80.1214 -34.391 639.8108 -119.672 -50.0869 324.6438 -77.4123 93.9302 626.7282 -267.504 -66.6167 470.3762 -76.0405 128.6993 454.7368 -124.577 98.1182 252.0708 -23.0718 -96.7615 470.0529 51.2798 -93.3202 589.3298 557.2144 -33.6977 91.8762 -95.0189 81.94 223.5363 Q-02) z2 x1 h2 zl 1x3 13 hl yl h3 is the minimum distance between x3 and x4 h3+d3 hl=400mm a = 50mm di z3 h1 -h2 Oi 01+/2 02+/2 h3+d30 hand origin ai 0 0 24 0 0 Ideal values of link parameters h2=150mm h3 = 250mm b=70mm c=55mm Q=(6/tf^5)*t^5 - (15/tf^4)*t^4+ (10/tf^3)*t^3 And the hand position is given as X = Xi +(Xf - Xi)*Q ai TT/2 TT/2 Local vector of p4 (in frame 4) a p4= Solve the following four questions: Question 1. Assign Cartesian frames to the links and check the validity of the above parameters table. 3 marks 3 marks Question 2. Calculate the robot Jacobian at the shown home position Question 3. Plot lot the joint trajectories which would move the origin of the hand on a straight line starting at (-50, 250, 350) mm and ending at (50, 300, 400) 6 marks NB: a nice time function to drive joints on trajectories is given as follows: Question 4. For the robot shown above, the data given in the attached Excel file have been collected for measured positions of point p4 at given sets of motor displacements. Undertake mathematical procedures to calibrate the robot and prove that the accuracy has improved. 8 marks
Expert Answer:

Related Book For 

Posted Date:
Students also viewed these mechanical engineering questions
-
Let A, B be sets. Define: (a) the Cartesian product (A B) (b) the set of relations R between A and B (c) the identity relation A on the set A [3 marks] Suppose S, T are relations between A and B, and...
-
Alabama Corp.'s taxable income differed from its accounting income for 2023. Accounting income includes an expense of $25,000 under meals and entertainment expense, with $3,000 of that total being...
-
The table shows the numbers an (in thousands) of residents of Alabama from 2010 through 2015. (a) Find the first differences of the data shown in the table. Then find a linear model that approximates...
-
Stockton Corporation purchased a new computer system on January 1, 2011, for $300,000 cash. The company also incurred $25,000 in installation costs and $10,000 to train its employees on the new...
-
A proton moves at \(6.67 \times 10^{5} \mathrm{~m} / \mathrm{s}\) undeflected in the \(+x\) direction through a velocity selector, a device containing crossed electric and magnetic fields. You...
-
A drug (D) is produced in a three-stage extraction from the leaves of a tropical plant. About 1000 kg of leaf is required to produce 1 kg of the drug. The extraction solvent (S) is a mixture...
-
a) Having graduated with a bachelor of commerce finance option, you have been requested to discuss with other employees in finance department on three ways that are used to describe real estate....
-
A 75 kg long-jumper takes 3.1 s to reach a prejump speed of 10 m/s. What ishis power output? answer in Watts
-
Juniper Enterprises sells handmade clocks. Its variable cost per clock is $8.50, and each clock sells for $17.00. The companys fixed costs total $10,328. Suppose that Juniper raises its price by 40...
-
The formation and evolution of identity is influenced by various internal and external factors. Explain how your identity was formed and developed from the beginning to now. Share your experience.
-
Shake Shacks Vegan Burgers reports the following information from its sales budget: Expected Sales: May $133,000 June 120,000 July 155,000 All sales are on credit and cash receipts are expected to be...
-
"What are the primary distinctions between Additive Manufacturing and Traditional Manufacturing?"
-
Ann Wright, Paralegal, billed Client #7 re Small Claims Matter $600 (including HST) on invoice #007. a) What special journal(s) should Ann Wright use to record the transaction?Explain. b )What ledger...
-
You own a small home-based business for catering and delivery to the local market. 1. Develop a 3-phase risk management framework/cycle for your business as follows: Phase 1: Describe in detail Major...
-
You are a Loan Officer with an Investment Bank. Today you need to set your lending parameters. They are: LTV: 55% 10 Year T-Bill: TBD Rate Markup: 300 Basis Points Term: 30 Years Amortization: 30...
-
In a system with an input and an output, what poles generate the steady-state response?
-
What would happen to a physical system that becomes unstable?
-
An artificial heart works in closed loop by varying its pumping rate according to changes in signals from the recipients nervous system. For feedback compensation design it is important to know the...
-
SteelTubes had sales of \($300\) million this year. Expenses were \($250\) million. Aside from these figures, the company also invested in new mills for carbon steel tubing, complete with peripheral...
-
Taxes are paid each year on some measure of financial gain. We typically think of financial gain as cash inflows minus cash outflows, and yet simply subtracting outflows due to capital investments in...
-
True or False: The Modified Accelerated Cost Recovery System is the most popular depreciation method used in computing corporate income tax liabilities.

Study smarter with the SolutionInn App